CAN 使用
1. CAN 简介
CAN (controller Area Network):控制器局域网络总线,是一种有效支持分布式控制或实时控制的串行通信网络。
目前世界上绝大多数汽车制造厂商都采用CAN总线来实现汽车内部控制系统之间的数据通信。
RK3568/RK3588的CAN驱动文件:drivers/net/can/rockchip/rockchip_canfd.c
在ArmSoM-Sige7中,CAN集成在40PIN中,可供用户复用为CAN相关引脚。
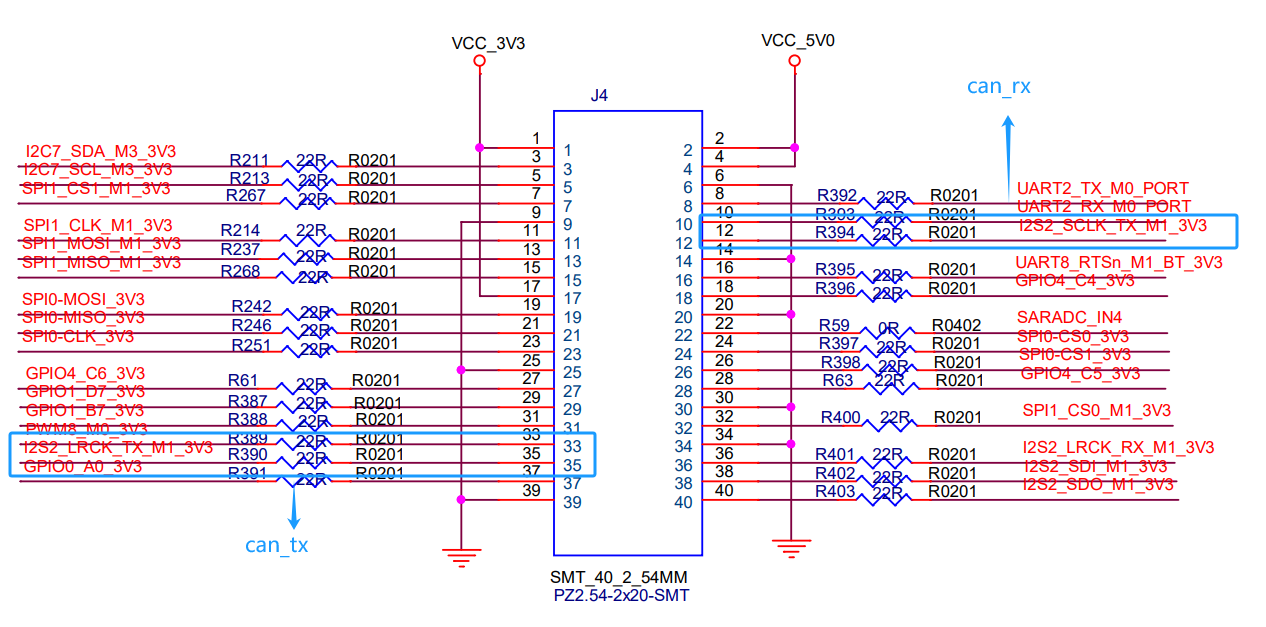
2. 原理图
CAN在40PIN中的位置: CAN_TX对应40PIN中的第35编号,CAN_RX对应40PIN中的第12编号
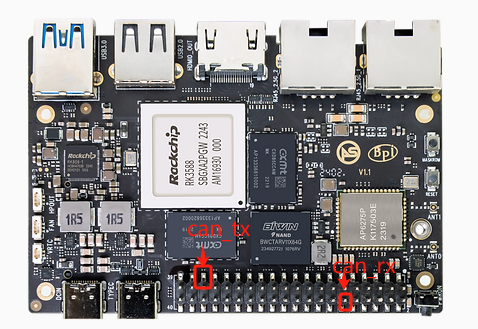
3. 硬件连接
CAN模块之间接线:CAN_TX接CAN_TX,CAN_RX接CAN_RX。
4. 内核配置
- rockchip_linux_defconfig配置:
CONFIG_CAN=y
CONFIG_CAN_DEV=y
CONFIG_CAN_ROCKCHIP=y
CONFIG_CANFD_ROCKCHIP=y
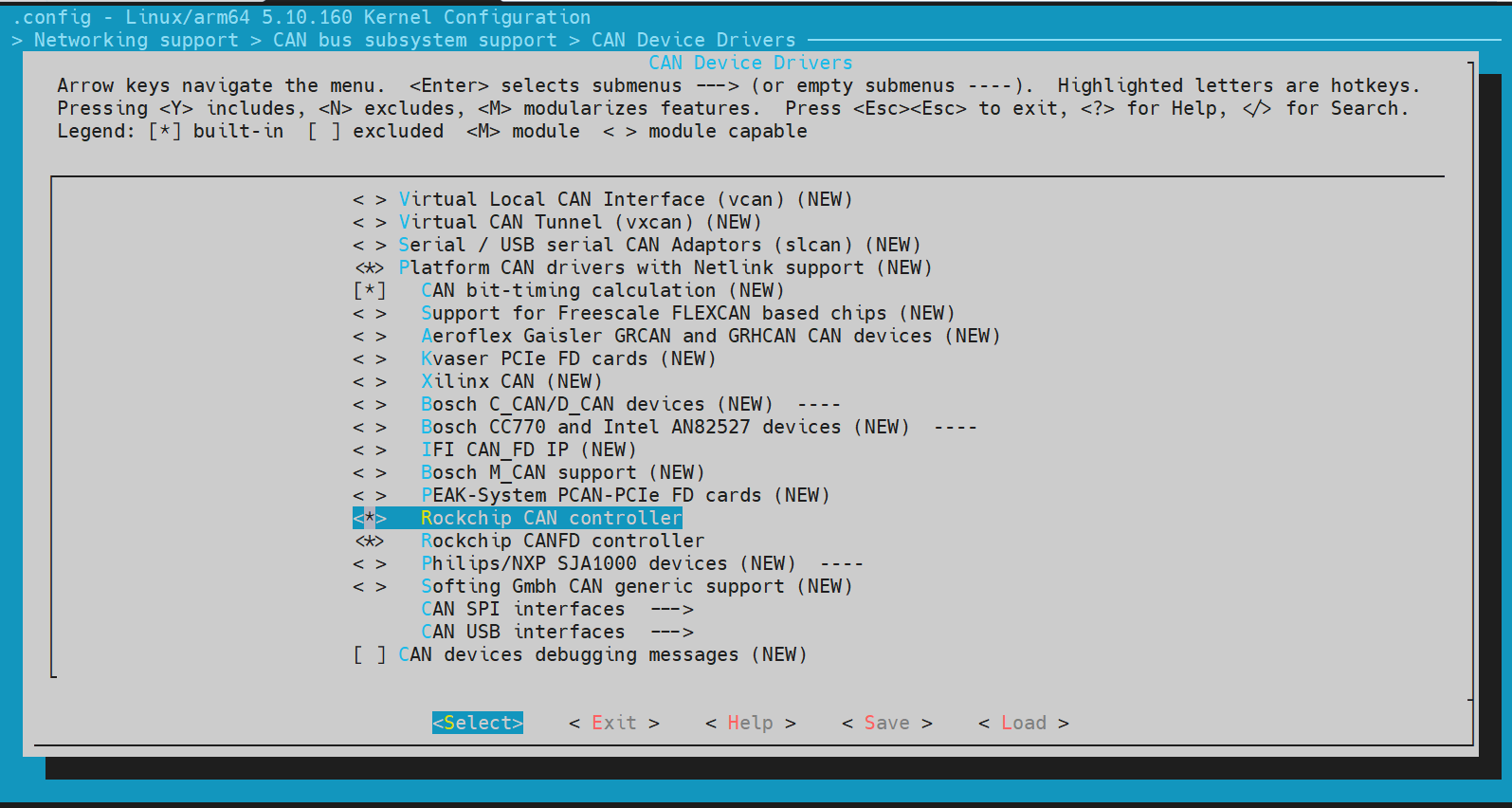
- 内核配置:
cd kernel
make ARCH=arm64 menuconfig
make savedefconfig
- 选择:Networking support ---> CAN bus subsystem support ()--->CAN Device Drivers() ---> Platform CAN drivers with Netlink support(*)
5. DTS 节点配置
5.1 主要参数:
interrupts 转换完成,产生中断信号。
clock 时钟属性,用于驱动开关clk,reset属性,用于每次复位总线。
pinctrl 配置CAN相关的引脚信息,功能复用
5.2 芯片级公共配置
kernel-5.10/arch/arm64/boot/dts/rockchip/rk3588s.dtsi
can0: can@fea50000 {
compatible = "rockchip,can-2.0";
reg = <0x0 0xfea50000 0x0 0x1000>;
interrupts = <GIC_SPI 341 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&cru CLK_CAN0>, <&cru PCLK_CAN0>;
clock-names = "baudclk", "apb_pclk";
resets = <&cru SRST_CAN0>, <&cru SRST_P_CAN0>;
reset-names = "can", "can-apb";
pinctrl-names = "default";
pinctrl-0 = <&can0m0_pins>;
tx-fifo-depth = <1>;
rx-fifo-depth = <6>;
status = "disabled";
};
can1: can@fea60000 {
compatible = "rockchip,can-2.0";
reg = <0x0 0xfea60000 0x0 0x1000>;
interrupts = <GIC_SPI 342 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&cru CLK_CAN1>, <&cru PCLK_CAN1>;
clock-names = "baudclk", "apb_pclk";
resets = <&cru SRST_CAN1>, <&cru SRST_P_CAN1>;
reset-names = "can", "can-apb";
pinctrl-names = "default";
pinctrl-0 = <&can1m0_pins>;
tx-fifo-depth = <1>;
rx-fifo-depth = <6>;
status = "disabled";
};
can2: can@fea70000 {
compatible = "rockchip,can-2.0";
reg = <0x0 0xfea70000 0x0 0x1000>;
interrupts = <GIC_SPI 343 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&cru CLK_CAN2>, <&cru PCLK_CAN2>;
clock-names = "baudclk", "apb_pclk";
resets = <&cru SRST_CAN2>, <&cru SRST_P_CAN2>;
reset-names = "can", "can-apb";
pinctrl-names = "default";
pinctrl-0 = <&can2m0_pins>;
tx-fifo-depth = <1>;
rx-fifo-depth = <6>;
status = "disabled";
};
compatible = “rockchip,can-1.0” ,rockchip,can-1.0用来匹配can控制器驱动。
compatible = “rockchip,can-2.0” ,rockchip,can-2.0用来匹配canfd控制器驱动。
assigned-clock-rates用来配置can的始终频率,如果CAN的比特率低于等于3M建议修改CAN时钟到100M,信号更稳定。高于3M比特率的,时钟设置200M就可以。
pinctrl配置:根据实际板卡连接情况配置can_h和can_l的iomux作为can功能使用。
5.3 板级配置
kernel-5.10/arch/arm64/boot/dts/rockchip/rk3588-armsom-w3.dts
/* can1 */
&can1 {
status = "okay";
assigned-clocks = <&cru CLK_CAN1>;
assigned-clock-rates = <200000000>;
pinctrl-names = "default";
pinctrl-0 = <&can1m1_pins>; #根据原理图进行配置
};
- 由于系统根据上述dts节点创建的CAN设备只有一个,而第一个创建的设备为CAN0
6. CAN通信测试
- 查询当前⽹络设备:
ifconfig -a
- CAN启动
ip link set can0 down //关闭CAN
ip link set can0 type can bitrate 500000 #设置⽐特率500KHz
ip -details -statistics link show can0 #打印can0信息
ip link set can0 up //启动CAN
- CAN发送
cansend can0 123#DEADBEEF #发送(标准帧,数据帧,ID:123,date:DEADBEEF)
cansend can0 123#R #发送(标准帧,远程帧,ID:123)
cansend can0 00000123#12345678 #发送(扩展帧,数据帧,ID:00000123,date:DEADBEEF)
cansend can0 00000123#R #发送(扩展帧,远程帧,ID:00000123)
- CAN接收
candump can0 //candump can0