W3 产品简介
让我们在 5 分钟内了解 W3。
简介
ArmSoM-W3使用ArmSoM-LM7核心板,是ArmSoM团队为专业的企业用户设计和开发的,搭载Rockchip RK3588 SoC四核ARM Cortex-A76和四核Cortex-A55,由八核CPU处理器组成,动态频率扩展至2.4GHz 。 内嵌高性能3D、2D图像加速模块,AI加速器NPU内置6TOPS算力。
支持多种操作系统,我们可以提供底板参考设计资料供用户自主深度定制。 可应用于ARM PC、边缘计算、云服务器、人工智能、云计算、虚拟/增强现实、区块链、智能NVR等多元化领域。
- ArmSoM-Sige7 单板计算机;
- ArmSoM-AIM7 AI核心板, ArmSoM-AIM-IO AIM7配套IO板;
- ArmSoM-LM7 LGA核心板, ArmSoM-W3 LM7 核心板开发套件;
依托强大的生态系统以及各式各样的扩展配件,ArmSoM 可以帮助用户轻松实现从创意到原型再到批量生产的交付,是创客、梦想家、业余爱好者的理想创意平台。
关键参数
- SOC: Rockchip RK3588
- CPU: Quad Cortex-A76 @2.4GHz +Quad Cortex-A55 @1.8GHz
- GPU: ARM Mali-G610 MP4
- NPU: 6Tops@INT8
- RAM: 4GB/8GB/16GB(up to 32GB)64-bit LPDDR4/LPDDR4x,Defalut LPDDR4x 8GB
- Flash: 16GB/32GB/64GB/128GB/256GB eMMC, Defaut eMMC 32GB, support MicroSD card extend
- Ethernet: 2.5Gbps Ethernet
- Support 1×HDMI In and 2×HDMI Out
Getting started
W3使用手册
如何开始使用你的W3
硬件信息
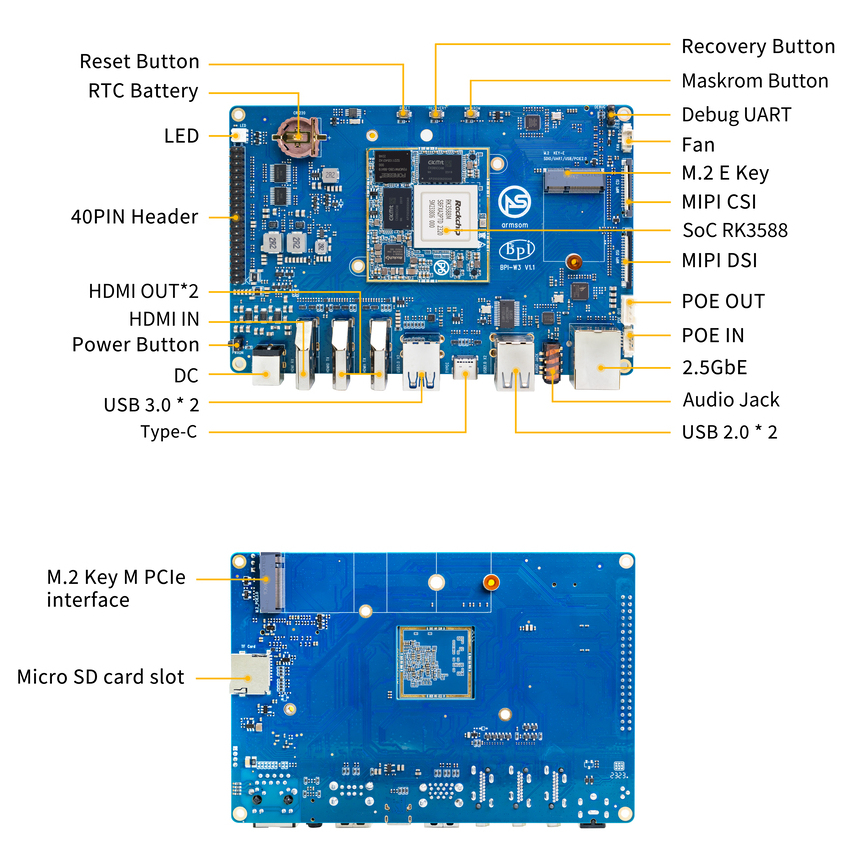
W3 硬件接口
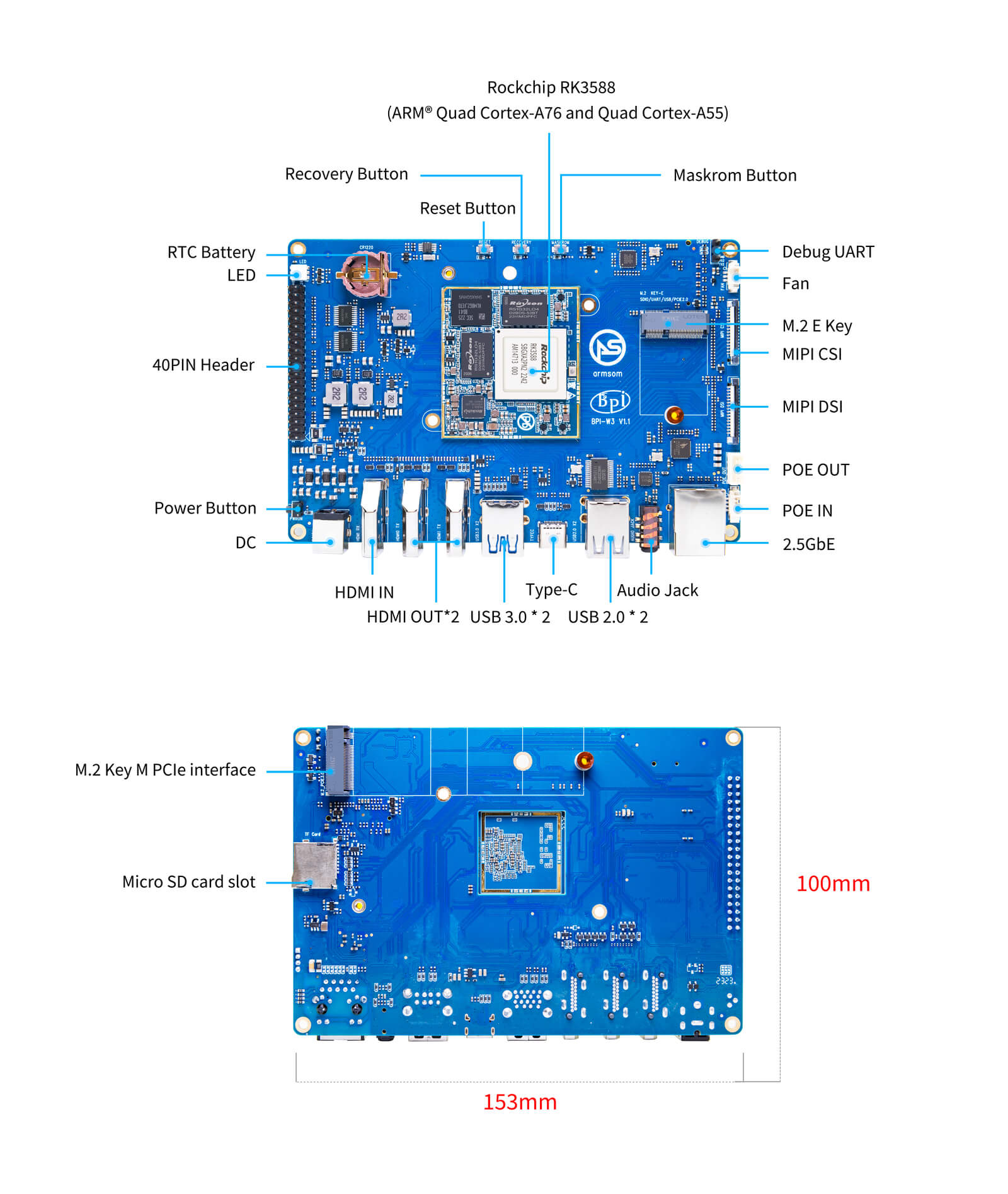
W3-M 硬件接口
W3(RK3588M)
硬件规格
W3 硬件规格
| 类别 | 功能参数 |
|---|---|
| SOC | |
| CPU | |
| GPU | |
| NPU | |
| VPU/编解码 | |
| ISP | |
| RAM | |
| Flash | |
| PCIe | |
| 网络 | |
| 视频输出 | |
| 视频输入 | |
| 音频 | |
| USB接口 | |
| 40-PIN | |
| 其他 | |
| 电源 | |
| 按键 | |
| 系统 | |
| 重量 | |
| 尺寸 | |
| 工作温度 |
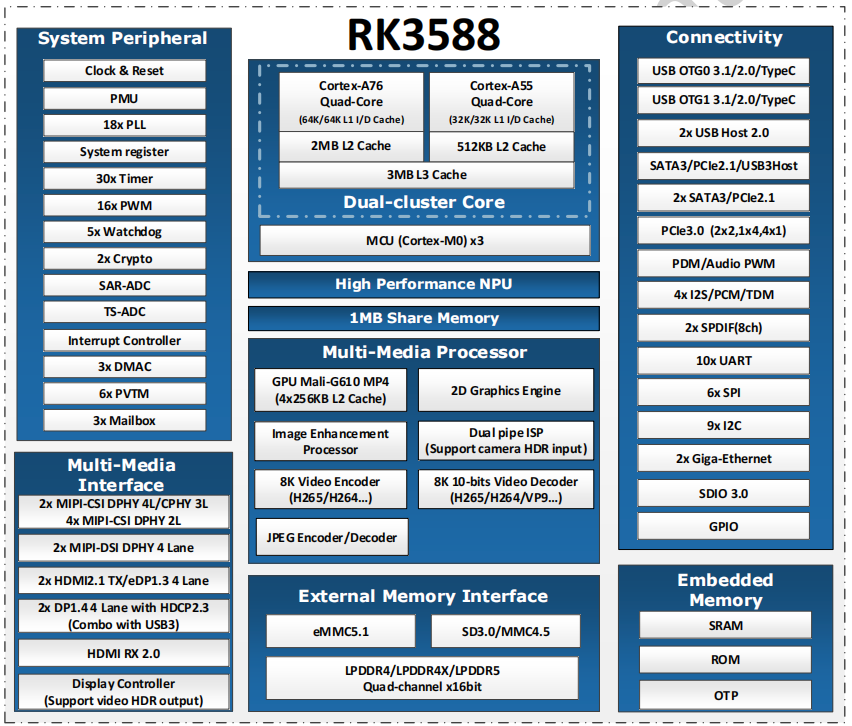
RK3588框图
RK3588 框图
引脚定义
40-PIN 座子
| GPIO number | 功能 | Pin | Pin | 功能 | GPIO number |
|---|---|---|---|---|---|
| +3.3V | 1 | 2 | +5.0V | ||
| 139 | I2S1_SDO2_M0 / I2C7_SDA_M3 / UART8_CTSN_M0 / PWM15_IR_M1 / CAN1_TX_M1 / GPIO4_B3 / | 3 | 4 | +5.0V | |
| 138 | I2S1_SDO1_M0 / I2C7_SCL_M3 / UART8_RTSN_M0 / PWM14_M1 / CAN1_RX_M1 / GPIO4_B2 | 5 | 6 | GND | |
| 115 | SPI1_CS1_M1 / I2C8_SDA_M4 / UART7_CTSN_M1 / PWM15_IR_M0 / GPIO3_C3 | 7 | 8 | GPIO0_B5 / UART2_TX_M0 / I2C1_SCL_M0 / I2S1_MCLK_M1 / JTAG_TCK_M2 | 13 |
| GND | 9 | 10 | GPIO0_B6 / UART2_RX_M0 / I2C1_SDA_M0 / I2S1_SCLK_M1 / JTAG_TMS_M2 | 14 | |
| 113 | SPI1_CLK_M1 / UART7_RX_M1 / GPIO3_C1 | 11 | 12 | GPIO3_B5 / CAN1_RX_M0 / PWM12_M0 /UART3_TX_M1 / I2S2_SCLK_M1 | 109 |
| 111 | SPI1_MOSI_M1 / I2C3_SCL_M1 / GPIO3_B7 | 13 | 14 | GND | |
| 112 | SPI1_MISO_M1 / I2C3_SDA_M1 / UART7_TX_M1 / GPIO3_C0 | 15 | 16 | GPIO3_A4 / SPI4_CS1_M1 / I2S3_SDI / UART8_RTSN_M1 | 100 |
| +3.3V | 17 | 18 | GPIO4_C4 / PWM5_M2 / SPI3_MISO_M0 | 148 | |
| 42 | SPI0_MOSI_M2 / UART4_RX_M2 / GPIO1_B2 | 19 | 20 | GND | |
| 41 | SPI0_MISO_M2 / GPIO1_B1 | 21 | 22 | SARADC_IN4 | |
| 43 | SPI0_CLK_M2 / UART4_TX_M2 / GPIO1_B3 | 23 | 24 | GPIO1_B4 / UART7_RX_M2 / SPI0_CS0_M2 | 44 |
| GND | 25 | 26 | GPIO1_B5 / UART7_TX_M2 / SPI0_CS1_M2 | 45 | |
| 150 | SPI3_CLK_M0 / I2C0_SDA_M1 / PWM7_IR_M3 / GPIO4_C6 | 27 | 28 | GPIO4_C5 / PWM6_M2 / I2C0_SCL_M1 | 149 |
| 63 | UART1_CTSN_M1 / PWM15_IR_M3 / GPIO1_D7 | 29 | 30 | GND | |
| 47 | SPDIF_TX_M0 / UART1_RX_M1 / PWM13_M2 / GPIO1_B7 | 31 | 32 | GPIO3_C2 / PWM14_M0 / UART7_RTSN_M1 / I2C8_SCL_M4 / SPI1_CS0_M1 | 114 |
| 103 | PWM8_M0 / GPIO3_A7 | 33 | 34 | GND | |
| 110 | I2S2_LRCK_M1 / UART3_RX_M1 / PWM13_M0 / CAN1_TX_M0 / GPIO3_B6 | 35 | 36 | GPIO3_B1 / PWM2_M1 / UART2_TX_M2 | 105 |
| 0 | REFCLK_OUT / GPIO0_A0 | 37 | 38 | GPIO3_B2 /PWM3_IR_M1 / UART2_RX_M2 / I2S2_SDI_M1 | 106 |
| GND | 39 | 40 | GPIO3_B3 / UART2_RTSN / I2S2_SDO_M1 | 107 |
MIPI CSI
| Pin | MIPI-CSI | 描述 |
|---|---|---|
| 1,4,7,10,13,16,19,21,24,25,26,27,32,33 | GND | Power Ground & Signal Ground |
| 2 | MIPI_CSI0_RX_D3N | MIPI RX Lane3 iuput N |
| 3 | MIPI_CSI0_RX_D3P | MIPI RX Lane3 iuput P |
| 5 | MIPI_CSI0_RX_D2N | MIPI RX Lane2 iuput N |
| 6 | MIPI_CSI0_RX_D2P | MIPI RX Lane2 iuput P |
| 8 | MIPI_CSI0_RX_CLK1N | MIPI RX Clock iuput N |
| 9 | MIPI_CSI0_RX_CLK1P | MIPI RX Clock iuput P |
| 11 | MIPI_CSI0_RX_D1N | MIPI RX Lane1 iuput N |
| 12 | MIPI_CSI0_RX_D1P | MIPI RX Lane1 iuput P |
| 14 | MIPI_CSI0_RX_D0N | MIPI RX Lane0 iuput N |
| 15 | MIPI_CSI0_RX_D0P | MIPI RX Lane0 iuput P |
| 17 | MIPI_CSI0_RX_CLK0N | MIPI RX Clock iuput N |
| 18 | MIPI_CSI0_RX_CLK0P | MIPI RX Clock iuput P |
| 20 | MIPI_CAM3_CLKOUT | 1.8V, CLock ouput for Sensor |
| 22 | MIPI_CAM1_CLKOUT | 1.8V, CLock ouput for Sensor |
| 23 | MIPI_CSI0_PDN0_H(GPIO1_B0) | 1.8V, GPIO |
| 24 | I2C3_SCL_M0_MIPI | 1.8V, I2C Clock, pulled up to 1.8V with 2.2K on w3 |
| 25 | I2C3_SDA_M0_MIPI | 1.8V, I2C Clock, pulled up to 1.8V with 2.2K on w3 |
| 26 | MIPI_CSI0_PDN1_H(GPIO1_A7) | 1.8V, GPIO |
| 27 | CM_RST_L(GPIO4_A0) | 3.3V, GPIO |
| 28,29 | VCC_RX | 3.3V Power ouput |
| 30,31 | VCC_5V0 | 5V Power ouput |
MIPI DSI
| Pin | MIPI-DSI | 描述 |
|---|---|---|
| 1,4,7,10,13,16,27,33,34 | GND | Power and Signal Ground |
| 2 | MIPI_DPHY1_TX_D0N | MIPI1 TX Lane0 ouput N |
| 3 | MIPI_DPHY1_TX_D0P | MIPI1 TX Lane0 ouput P |
| 5 | MIPI_DPHY1_TX_D1N | MIPI1 TX Lane1 ouput N |
| 6 | MIPI_DPHY1_TX_D1P | MIPI1 TX Lane1 ouput P |
| 8 | MIPI_DPHY1_TX_CLKN | MIPI1 TX Clock ouput N |
| 9 | MIPI_DPHY1_TX_CLKP | MIPI1 TX Clock ouput P |
| 11 | MIPI_DPHY1_TX_D2N | MIPI1 TX Lane2 ouput N |
| 12 | MIPI_DPHY1_TX_D2P | MIPI1 TX Lane2 ouput P |
| 14 | MIPI_DPHY1_TX_D3N | MIPI1 TX Lane3 ouput N |
| 15 | MIPI_DPHY1_TX_D3P | MIPI1 TX Lane3 ouput P |
| 17 | LCD_PWM (PWM2_M2/GPIO4_C2) | 1.8V, GPIO/PWM |
| 18,19 | VCC3V3_LCD | 3.3V Power ouput |
| 20 | LCD_RESET (GPIO2_C1) | 1.8V, GPIO |
| 21 | /NC | No Connection |
| 22 | LCD_BL_EN (GPIO3_A1) | 3.3V, GPIO |
| 23 | I2C6_SCL_M0 | 1.8V, I2C Clock, pulled up to 1.8V with 2.2K on w3 |
| 24 | I2C6_SDA_M0 | 1.8V, I2C Data, pulled up to 1.8V with 2.2K on w3 |
| 25 | TP_INT (GPIO0_D3) | 1.8V, GPIO |
| 26 | TP_RST (GPIO0_C6) | 1.8V, GPIO |
| 28,29 | VCC5V0_LCD | 5V Power ouput |
| 31,32 | VCC_1V8 | 1.8V Power ouput |
Debug UART
| Pin | Assignment | Description |
|---|---|---|
| 1 | UART2_RX_M0 | intput |
| 2 | UART2_TX_M0 | output |
| 3 | GND | 0V |
PoE In
| Pin | Assignment | Description |
|---|---|---|
| 1 | VC1 | TX1 |
| 2 | VC2 | RX1 |
| 3 | VC3 | TX2 |
| 4 | VC4 | RX2 |
PoE Out
| Pin | Assignment | Description |
|---|---|---|
| 1 | VDD_POE | 12V Power ouput |
| 2 | VDD_POE | 12V Power ouput |
| 3 | GND | 地 |
| 4 | GND | 地 |
开发资料
SDK源码
ArmSom-bsp
Building a Linux System
Armbian源码
适用于 ARM 开发板的 Linux
W3 kernel
Improved Rockchip Linux
W3 uboot
ArmSoM/u-boot
W3 mainline linux
torvalds linux
RKNN-LLM
AI models to Rockchip chips
官方镜像
ArmSoM团队以 Debian bullseye 为基础作为官方操作系统。如何烧录系统镜像?📤
以下系统已由ArmSoM官方测试验证:
网盘地址:
百度网盘链接| logo | Description | Download |
|---|---|---|
 | debian11 : Debian 11(代号为"Bullseye")是Debian项目的最新稳定版本,它于2021年8月14日发布。Debian是一个以自由软件为基础的操作系统,以稳定性、安全性和开放性著称。 | 百度网盘 |
 | Android12: 安卓(Android)是一个基于Linux内核的开放源代码操作系统,主要用于移动设备、平板电脑和智能手表等智能设备。 | 百度网盘 |
发布信息
ArmSoM-W3 的首次官方发布通告请在以下链接查看: ArmSoM-W3 系统发布通知
第三方系统
| logo | Description | Download |
|---|---|---|
| Armbian : Armbian 是一个计算构建框架,允许用户根据各种单板计算机的可变用户空间配置创建带有工作内核的即用镜像。它为一些支持的单板计算机提供各种预构建镜像,通常基于 Debian 或 Ubuntu。 | armbian固件下载 | |
 | ubuntu-rockchip : 该项目旨在为Rockchip RK3588设备提供默认的Ubuntu体验。立即开始,选择适合的Ubuntu服务器或桌面镜像,享受熟悉的环境。 | ubuntu-rockchip固件下载 |
| lede | lede : OpenWRT是一个高度模块化、高度自动化的嵌入式Linux系统,拥有强大的网络组件和扩展性。 | coolsnowwolf |
硬件资料
获取开发套件原理图、PCB、DXF等硬件资料,快速投入开发
ArmSoM-LM7 引脚功能表格 - 引脚功能表格下载
ArmSoM-LM7 封装 - 封装下载
W3 Schematics
source files (orcad)
W3 PCB
PCB source files (PADS)
W3 2D
2D CAD files
W3 SMD
components Position Reference of W3
注意
不建议使用LM7开发8K显示: HDMI输出8K对layout走线要求很高,核心板+底板的设计方式基本是无解。
只能采用一体板设计,需注意HDMI信号整个路径不能有换层。
严格按照硬件参考设计说明控制阻抗、等长。
HDMI的连接器也要选支持2.1协议的,需要使用支持8K的连接器。
使用手册
LM7开发套件(ArmSoM-W3)使用手册,帮助软件工程师掌握开发板使用 。
入门准备
在开始使用 ArmSoM-W3 之前,请准备好以下物品
工具准备
- ArmSoM-W3 主板
- 电源(三选一)
- 支持 9V/2A、12V/2A、15V/2A 和 20V/2A 的 USB Type-C PD 2.0
- 支持 DC 12V适配器,2.5mm
- 支持 PoE 12V
- 系统安装(二选一)
- MicroSD卡/TF卡启动
- MicroSD卡/TF卡,Class 10或以上至少8GB SDHC 和 读卡器,
- 以下是经过ArmSoM团队测试验证的高速TF卡
- SanDisk 32GB TF(MicroSD)(开发者推荐)
- SanDisk 32GB TF(MicroSD) 行车记录仪&安防监控专用存储卡(长期运行推荐)
- 闪迪 TF 8G Class10 microSD
- 闪迪 TF 128G Class10 microSD XC TF 128G 48MB/S:
- 板载eMMC启动
- USB A型转 C型数据线,从 typec 端口在 ArmSoM-W3 上写入镜像或使用 fastboot/adb 命令,您需要 USB A转type C数据线连接 ArmSoM-W3 和 PC。
- MicroSD卡/TF卡启动
可选选项
- USB 键盘鼠标
- HDMI 显示器和 HDMI 线
- ArmSoM-W3配备了全尺寸 HDMI 接口,最高支持 8K@60 显示。
- HDMI EDID用于确定最佳显示分辨率。 在支持 1080p(或 4K/8K)的显示器和电视上,将选择此分辨率。 如果不支持 1080p,EDID会找到的下一个可用分辨率。
- Ethernet 线(网线)
- ArmSoM-W3支持以太网上网,最高支持2.5G。
- 网线用于将ArmSoM-W3连接到本地网络和互联网。
- 摄像头模块
- ArmSoM-W3支持拍照功能
- 推荐使用camera-module1 模组,可找ArmSoM官方店淘宝客服购买。
- LCD显示屏
- ArmSoM-W3支持LCD显示功能。
- 推荐使用 ArmSoM Display 10 HD,可找ArmSoM官方店淘宝客服购买。
- 音频线
- 可以使用标准 3.5 毫米插孔通过扬声器或耳机播放音频。
- WiFi/蓝牙卡
- ArmSoM 支持市面上常见的无线模块,请查看支持列表的 Wireless 列表。
- 推荐使用 RTL8852be,AP6256
- USB-A型转USB-C型数据线
烧录方式选择
接口设置
如果你是首次使用 ArmSoM-W3,请先熟悉下 外设接口,以便于你更好的理解后续的内容。
2.5G 以太网口
如果您使用的是以太网有线上网方式,请将网线对准 ArmSoM-W3 上的 RJ45 端口插入,系统桌面就会弹出有线连接。
手动配置以太网
- 切换root用户
sudo su
- 通过命令 ifconfig 检查以太网是否正常,它会显示网卡 eth0 或 enP4p65s0 以及以太网 IP 地址。 此外,使用工具 ping 判断是否连通网络。
ifconfig
ping www.baidu.com
- 如果无法ping通,尝试
$ sudo dhclient eth0
or
$ sudo dhclient enP4p65s0
音频
查看系统中的声卡。
root@linaro-alip:/# aplay -l
**** List of PLAYBACK Hardware Devices ****
card 0: rockchipdp0 [rockchip,dp0], device 0: rockchip,dp0 spdif-hifi-0 [rockchip,dp0 spdif-hifi-0]
Subdevices: 1/1
Subdevice #0: subdevice #0
card 1: rockchipes8316 [rockchip-es8316], device 0: fe470000.i2s-ES8316 HiFi es8316.7-0011-0 [fe470000.i2s-ES8316 HiFi es8316.7-0011-0]
Subdevices: 1/1
Subdevice #0: subdevice #0
card 3: rockchiphdmi0 [rockchip-hdmi0], device 0: rockchip-hdmi0 i2s-hifi-0 [rockchip-hdmi0 i2s-hifi-0]
Subdevices: 1/1
Subdevice #0: subdevice #0
card 4: rockchiphdmi1 [rockchip-hdmi1], device 0: rockchip-hdmi1 i2s-hifi-0 [rockchip-hdmi1 i2s-hifi-0]
Subdevices: 1/1
Subdevice #0: subdevice #0
播放音乐
armsom@armsom-sige7:/# aplay -D plughw:1,0 ./usr/share/sounds/alsa/Front_Right.wav
USB接口
ArmSoM-W3 提供两个 USB 2.0 和两个 USB 3.0 端口。
Type-C
ArmSoM-W3 配备全功能 USB Type‑C™ 3.0 端口,支持高达 8K@30fps 的 DP 显示
HDMI
ArmSoM-W3 有两个 HDMI 输出端口,均支持 CEC 和 HDMI 2.1,分辨率最高支持分别为 8Kp60 和 4Kp60。
注意: 在使用之前,请确认 HDMI 线的接口规格。
HDMI IN
ArmSoM-W3使用rk3588原生hdmi rx接口,可以使用v4l2命令测试hdmi in接口。
查看所有视频节点
ls /dev/video*
查找 rk hdmirx 设备
执行v4l2-ctl -d命令指定vidoe节点。执行-D命令查看节点信息。使用驱动程序名称检查 rk_hdmirx 设备。
root@linaro-alip:/# v4l2-ctl -d /dev/video0 -D
Driver Info:
Driver name : rk_hdmirx
Card type : rk_hdmirx
Bus info : fdee0000.hdmirx-controller
Driver version : 5.10.66
Capabilities : 0x84201000
Video Capture Multiplanar
Streaming
Extended Pix Format
Device Capabilities
Device Caps : 0x04201000
Video Capture Multiplanar
Streaming
Extended Pix Format
查询分辨率和图像格式
查询当前分辨率和图像格式:
root@linaro-alip:/# v4l2-ctl -d /dev/video17 --get-fmt-video
Format Video Capture Multiplanar:
Width/Height : 3840/2160
Pixel Format : 'NV16'
Field : None
Number of planes : 1
Flags : premultiplied-alpha, 000000fe
Colorspace : Unknown (1025fcdc)
Transfer Function : Unknown (00000020)
YCbCr Encoding : Unknown (000000ff)
Quantization : Default
Plane 0 :
Bytes per Line : 3840
Size Image : 16588800
抓取图像文件
将镜像文件保存到设备,通过7yuv等工具查看:
v4l2-ctl --verbose -d /dev/video17 \
--set-fmt-video=width=3840,height=2160,pixelformat='NV16' \
--stream-mmap=4 --stream-skip=3 \
--stream-to=/data/4k60_nv16.yuv \
--stream-count=5 --stream-poll
RGB LED
ArmSoM-W3 具有电源 LED 和用户 LED。
电源指示灯 电源 LED 为绿色, ArmSoM-W3默认通电时常亮。
用户指示灯 用户 LED 为蓝色, 默认情况下,其闪烁状态显示正在运行的内核。
用户可通过命令控制
linaro@linaro-alip:/# sudo su
root@linaro-alip:/# echo timer > /sys/class/leds/blue:status/trigger
root@linaro-alip:/# echo activity > /sys/clas
RTC
- ArmSoM-W3配备了一颗RTC IC hym8563。
- 首先,插入RTC电池给RTC IC供电。
- 请注意,我们应该将 RTC 电池保留在 RTC 连接器中,并确认 rtc hym8563 设备已创建
root@linaro-alip:/# dmesg | grep rtc
[ 6.407133] rtc-hym8563 6-0051: rtc information is valid
[ 6.412731] rtc-hym8563 6-0051: registered as rtc0
[ 6.413779] rtc-hym8563 6-0051: setting system clock to 2022-06-22T01:22:26 UTC (1655860946)
- 找到rtc0,然后使用以下命令设置系统时间并同步到rtc0。
root@linaro-alip:/# hwclock -r
2023-11-03 10:32:40.461910+00:00
root@linaro-alip:/# date
2023年 11月 03日 星期五 10:33:12 UTC
root@linaro-alip:/# hwclock -w
root@linaro-alip:/# hwclock -r
root@linaro-alip:/# poweroff
- 关闭RTC电池,10分钟或更长时间后,插入RTC电池并启动ArmSoM-W3,检查RTC是否与系统时钟同步
root@linaro-alip:/# hwclock -r
2023-11-03 10:35:40.461910+00:00
root@linaro-alip:/# date
2023年 11月 03日 星期五 10:36:01 UTC
风扇
ArmSoM-W3 配备一个 5V 的风扇,使用 1.25mm 的连接器
root@linaro-alip:/# echo 0 > /sys/devices/platform/fd8b0010.pwm/pwm/pwmchip*/export
root@linaro-alip:/# echo 10000 > /sys/devices/platform/fd8b0010.pwm/pwm/pwmchip*/pwm0/period
root@linaro-alip:/# echo 5000 > /sys/devices/platform/fd8b0010.pwm/pwm/pwmchip*/pwm0/duty_cycle
root@linaro-alip:/# echo inversed > /sys/devices/platform/fd8b0010.pwm/pwm/pwmchip*/pwm0/polarity
root@linaro-alip:/# echo 1 > /sys/devices/platform/fd8b0010.pwm/pwm/pwmchip*/pwm0/enable
root@linaro-alip:/# echo 0 > /sys/devices/platform/fd8b0010.pwm/pwm/pwmchip*/pwm0/enable
M.2接口
ArmSoM-W3 提供两个 M.2 连接器:
- 主板正面有一个带 2230 安装孔的 M.2 E Key 连接器,提供 PCIe 2.1 单通道、USB、SATA、SDIO、PCM 和 UART 信号,支持工业标准 M.2 WiFi 6 模块。
ArmSoM 推荐使用 RTL8852BE,AP6256。安装在 ArmSoM-W3 的 M.2 E 口然后设置 wifi 网络就可以上网。
# 加载驱动
root@linaro-alip:/# insmod system/lib/modules/rtkm.ko
root@linaro-alip:/# insmod system/lib/modules/rtkm.ko
root@linaro-alip:/# insmod /usr/lib/modules/rtk_btusb.ko
root@linaro-alip:/# lsmod
Module Size Used by
8852be 4030464 0
rtkm 16384 1 8852be
rtk_btusb 57344 0
WIFI
# 1. Switch to super user mode
root@linaro-alip:/# sudo su
# 2. Open the WIFI
root@linaro-alip:/# nmcli r wifi on
# 3. Scan WIFI
root@linaro-alip:/# nmcli dev wifi
# 4. Connect to WIFI network
root@linaro-alip:/# nmcli dev wifi connect "wifi_name" password "wifi_password"
BT
# 1. 激活蓝牙
root@linaro-alip:/# service bluetooth start
# 2. 进入bluetoothctl
root@linaro-alip:/# bluetoothctl
# 3. 输入以下命令即可连接
root@linaro-alip:/# power on
root@linaro-alip:/# agent on
root@linaro-alip:/# default-agent
root@linaro-alip:/# scan on
root@linaro-alip:/# pair yourDeviceMAC
- 产品的背面有一个带有四通道 PCIe 3.0 接口的 M.2 M Key 连接器。 板上有一个标准的 M.2 2280 安装孔,可以部署 M.2 2280 NVMe SSD。
注意:该 M.2 接口不支持 M.2 SATA SSD。
root@linaro-alip:/# mkdir temp
root@linaro-alip:/# mount /dev/nvme0n1 temp
MIC录音
root@linaro-alip:/root# arecord -D hw:1,0 -f S16_LE -t wav -c2 -r 16000 -d 3 t.wav
Recording WAVE 't.wav' : Signed 16 bit Little Endian, Rate 16000 Hz, Stereo
root@linaro-alip:/root# aplay t.wav
Playing WAVE 't.wav' : Signed 16 bit Little Endian, Rate 16000 Hz, Stereo
摄像头
MIPI-CSI
摄像头采用camera-module1 模组,摄像头模组连接并上电后可以查看启动日志。
root@armsom-w3:/# dmesg | grep ov13850
[ 3.555686] ov13850 3-0010: driver version: 00.01.05
[ 3.555722] ov13850 3-0010: Failed to get power-gpios, maybe no use
[ 3.555762] ov13850 3-0010: Looking up avdd-supply from device tree
[ 3.555773] ov13850 3-0010: Looking up avdd-supply property in node /i2c@feab0000/ov13850@10 failed
[ 3.555794] ov13850 3-0010: supply avdd not found, using dummy regulator
[ 3.555874] ov13850 3-0010: Looking up dovdd-supply from device tree
[ 3.555883] ov13850 3-0010: Looking up dovdd-supply property in node /i2c@feab0000/ov13850@10 failed
[ 3.555895] ov13850 3-0010: supply dovdd not found, using dummy regulator
[ 3.555927] ov13850 3-0010: Looking up dvdd-supply from device tree
[ 3.555935] ov13850 3-0010: Looking up dvdd-supply property in node /i2c@feab0000/ov13850@10 failed
[ 3.555945] ov13850 3-0010: supply dvdd not found, using dummy regulator
[ 3.555972] ov13850 3-0010: could not get default pinstate
[ 3.555979] ov13850 3-0010: could not get sleep pinstate
[ 3.561005] ov13850 3-0010: Detected OV00d850 sensor, REVISION 0xb2
[ 3.561027] rockchip-csi2-dphy csi2-dphy0: dphy0 matches m00_b_ov13850 3-0010:bus type 5
使用v4l2-ctl进行抓图
root@linaro-alip:/# v4l2-ctl -d /dev/video11 --set-selection=target=crop,top=0,left=0,width=2112,height=1568 --set-fmt-video=width=2112,height=1568,pixelformat=NV12 --stream-mmap=3 --stream-to=/nv12.bin --stream-count=1 --stream-poll
使用gst-launch-1.0可直接录像
root@linaro-alip:/# gst-launch-1.0 v4l2src device=/dev/video11 ! video/x-raw,format=NV12,width=2112,height=1568, framerate=30/1 ! xvimagesink

USB3.0 Camera
连接usb3.0摄像头后,打开Qt V4L2 test Utility应用程序进行测试
打开视频节点:video21
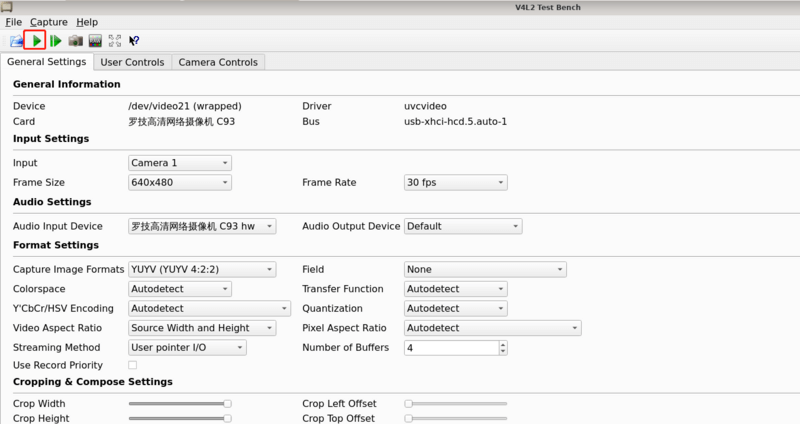
点击相机按钮,您将看到相机屏幕
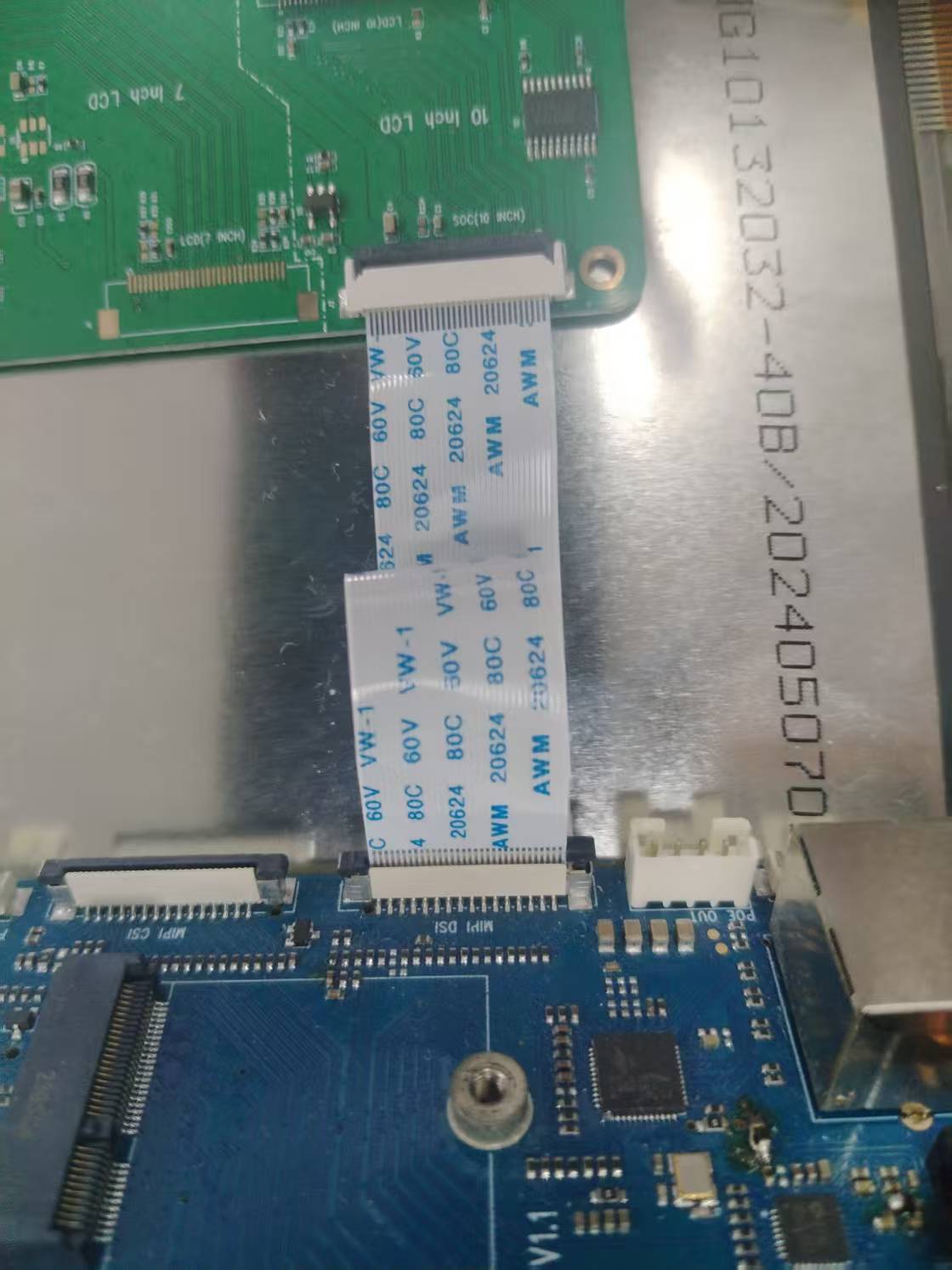
MIPI DSI
ArmSoM-W3 分辨率最高分辨率可达 4K@60Hz
样品购买
ArmSoM 独立站: https://www.armsom.org/product-page/lm7-development-kit
ArmSoM 速卖通官方店: https://www.aliexpress.com/item/3256805434864544.html
ArmSoM 淘宝官方店: https://item.taobao.com/item.htm?id=714794342755
OEM&ODM, 请联系: sales@armsom.org
专家视角
- sbc compare: W3 Benchmark Comparison on sbc.compare
注意事项
- 在接触设备之前,请务必佩戴静电手环或采取静电释放措施,以避免静电对开发板造成损害。
- 进行组装时,应在静电消除环境中进行,避免在干燥和低湿度的条件下操作。
- 不使用时,请将设备放置在静电袋内,并存储于温度适宜、低湿度的环境中,以防止静电产生。
- 在处理设备时,请避免摩擦或碰撞,以防产生静电并造成损坏。
- 握持设备时,尽量避免直接接触主板上的芯片,以免静电损坏芯片。
- 使用设备时,请勿在运行过程中插拔电线或其他设备,以避免电流冲击导致的损害。
- 在插拔扩展GPIO/MIPI接口时,请先关闭电源并断开电源线,以避免电流对设备造成损害。