Product Introduction: W3
Let's get to know W3 in 5 minutes.
Overview
The ArmSoM-W3, utilizing the ArmSoM-LM7 core board, is designed and developed by the ArmSoM team for professional enterprise users. It features the Rockchip RK3588 SoC with a quad-core ARM Cortex-A76 and a quad-core Cortex-A55, comprising an eight-core CPU processor with a dynamic frequency up to 2.4GHz. It includes high-performance 3D and 2D image acceleration modules, and an AI accelerator NPU with 6 TOPS of computational power.
It supports multiple operating systems.
We can provide baseboard reference design materials for users to customize in-depth independently.
It can be applied to diversified fields such as ARM PCs, edge computing, cloud servers, artificial intelligence, cloud computing, virtual/augmented reality, blockchain, smart NVRs, etc.
Rockchip RK3588 design ArmSoM-Sige7 AI SBC design;
Rockchip RK3588 design ArmSoM-AIM7 Core board fully compatible with Jetson Nano/TX2 NX;
Rockchip RK3588 design ArmSoM-LM7 LGA core board ;
Rockchip RK3588 design ArmSoM-W3 LGA core board maker kit;
With the powerful ecosystem and variety of extension modules, ArmSoM can help users easily go from ideas to prototype to mass production, making it an ideal creative platform for makers, dreamers and hobbyists.
Key Parameters
- SOC: Rockchip RK3588
- CPU: Quad Cortex-A76 @2.4GHz +Quad Cortex-A55 @1.8GHz
- GPU: ARM Mali-G610 MP4
- NPU: 6Tops@INT8
- RAM: 4GB/8GB/16GB(up to 32GB)64-bit LPDDR4/LPDDR4x,Defalut LPDDR4x 8GB
- Flash: 16GB/32GB/64GB/128GB/256GB eMMC, Defaut eMMC 32GB, support MicroSD card extend
- Ethernet: 2.5Gbps Ethernet
- Support 1×HDMI In and 2×HDMI Out
Getting started
W3 User Manual
How to start using your W3
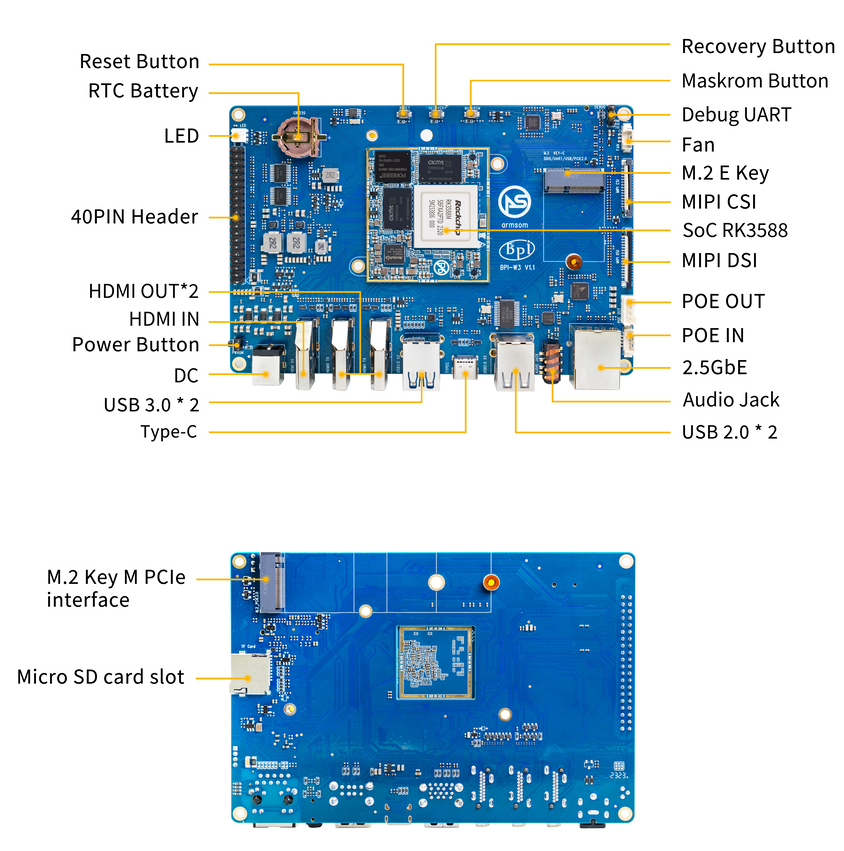
Hardware
Hardware Interface RK3588
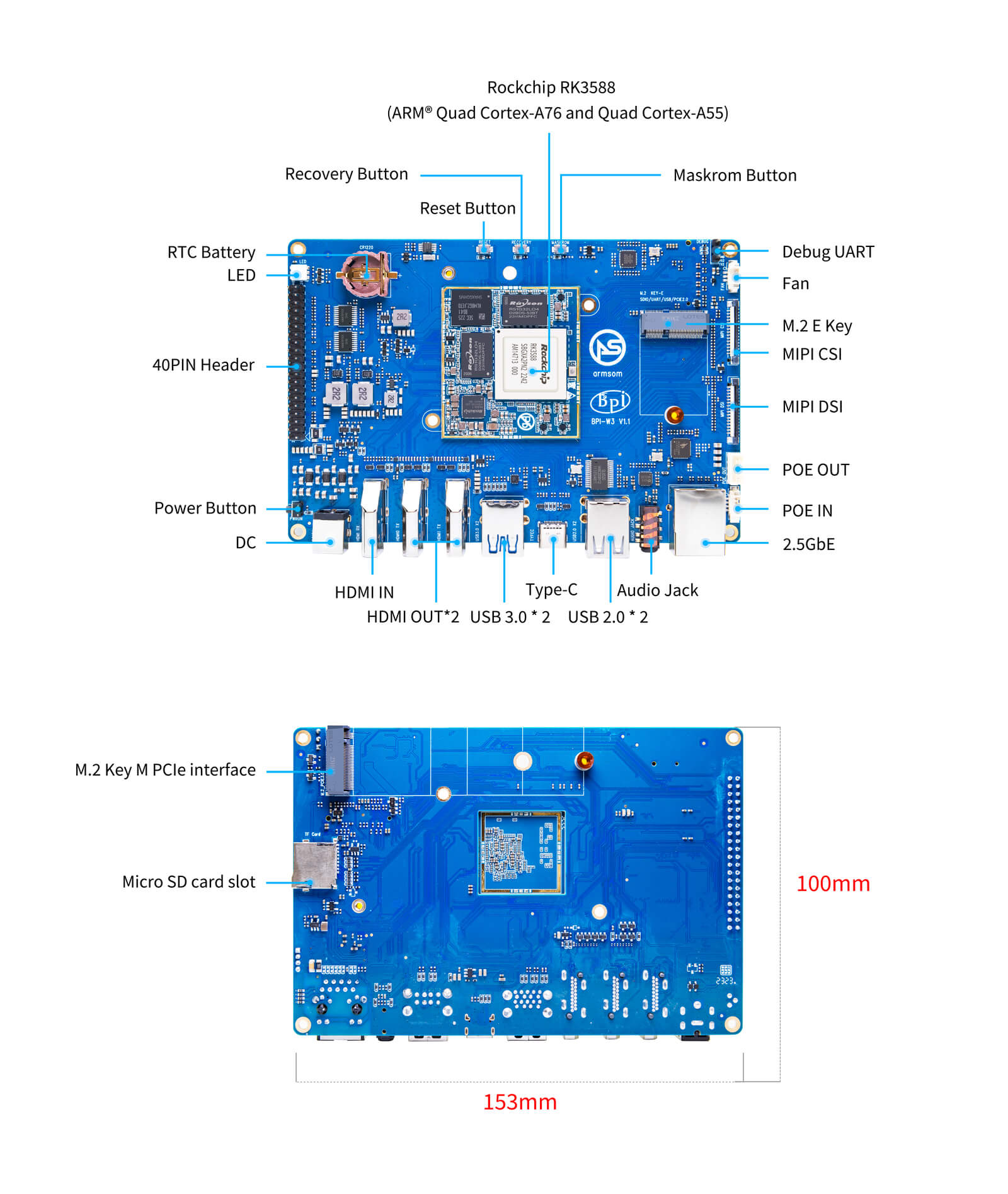
W3-M Hardware Interface
W3 Hardware Spec
| Type | Function parameter |
|---|---|
| SOC | |
| CPU | |
| GPU | |
| NPU | |
| VPU/codec | |
| ISP | |
| RAM | |
| Flash | |
| PCIe | |
| Network | |
| Video output | |
| Video input | |
| Audio | |
| USB interface | |
| 40-PIN | |
| Others | |
| Power supply | |
| Keys | |
| Operation system | |
| Weight | |
| Size | |
| Operating temperature |
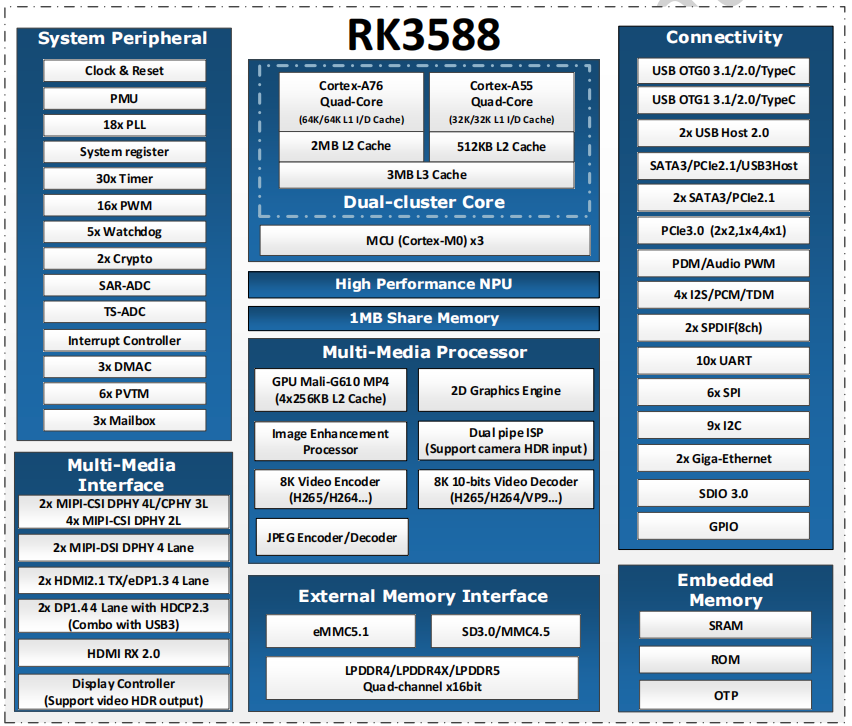
RK3588 Block Diagram
Hardware Pin Definitions
40-PIN header
| GPIO number | Function | Pin | Pin | Function | GPIO number |
|---|---|---|---|---|---|
| +3.3V | 1 | 2 | +5.0V | ||
| 139 | I2S1_SDO2_M0 / I2C7_SDA_M3 / UART8_CTSN_M0 / PWM15_IR_M1 / CAN1_TX_M1 / GPIO4_B3 / | 3 | 4 | +5.0V | |
| 138 | I2S1_SDO1_M0 / I2C7_SCL_M3 / UART8_RTSN_M0 / PWM14_M1 / CAN1_RX_M1 / GPIO4_B2 | 5 | 6 | GND | |
| 115 | SPI1_CS1_M1 / I2C8_SDA_M4 / UART7_CTSN_M1 / PWM15_IR_M0 / GPIO3_C3 | 7 | 8 | GPIO0_B5 / UART2_TX_M0 / I2C1_SCL_M0 / I2S1_MCLK_M1 / JTAG_TCK_M2 | 13 |
| GND | 9 | 10 | GPIO0_B6 / UART2_RX_M0 / I2C1_SDA_M0 / I2S1_SCLK_M1 / JTAG_TMS_M2 | 14 | |
| 113 | SPI1_CLK_M1 / UART7_RX_M1 / GPIO3_C1 | 11 | 12 | GPIO3_B5 / CAN1_RX_M0 / PWM12_M0 /UART3_TX_M1 / I2S2_SCLK_M1 | 109 |
| 111 | SPI1_MOSI_M1 / I2C3_SCL_M1 / GPIO3_B7 | 13 | 14 | GND | |
| 112 | SPI1_MISO_M1 / I2C3_SDA_M1 / UART7_TX_M1 / GPIO3_C0 | 15 | 16 | GPIO3_A4 | 100 |
| +3.3V | 17 | 18 | GPIO4_C4 / PWM5_M2 / SPI3_MISO_M0 | 148 | |
| 42 | SPI0_MOSI_M2 / UART4_RX_M2 / GPIO1_B2 | 19 | 20 | GND | |
| 41 | SPI0_MISO_M2 / GPIO1_B1 | 21 | 22 | SARADC_IN4 | |
| 43 | SPI0_CLK_M2 / UART4_TX_M2 / GPIO1_B3 | 23 | 24 | GPIO1_B4 / UART7_RX_M2 /SPI0_CS0_M2 | 44 |
| GND | 25 | 26 | GPIO1_B5 / UART7_TX_M2 / SPI0_CS1_M2 | 45 | |
| 150 | SPI3_CLK_M0 / I2C0_SDA_M1 / PWM7_IR_M3 / GPIO4_C6 | 27 | 28 | GPIO4_C5 / PWM6_M2 / I2C0_SCL_M1 | 149 |
| 63 | UART1_CTSN_M1 / PWM15_IR_M3 / GPIO1_D7 | 29 | 30 | GND | |
| 47 | SPDIF_TX_M0 / UART1_RX_M1 / PWM13_M2 / GPIO1_B7 | 31 | 32 | GPIO3_C2 / PWM14_M0 / UART7_RTSN_M1 / I2C8_SCL_M4 / SPI1_CS0_M1 | 114 |
| 103 | PWM8_M0 / GPIO3_A7 | 33 | 34 | GND | |
| 110 | I2S2_LRCK_M1 / UART3_RX_M1 / PWM13_M0 / CAN1_TX_M0 / GPIO3_B6 | 35 | 36 | GPIO3_B1 / PWM2_M1 / UART2_TX_M2 | 105 |
| 0 | REFCLK_OUT / GPIO0_A0 | 37 | 38 | GPIO3_B2 /PWM3_IR_M1 / UART2_RX_M2 / I2S2_SDI_M1 | 106 |
| GND | 39 | 40 | GPIO3_B3 / UART2_RTSN / I2S2_SDO_M1 | 107 |
MIPI CSI
| Pin | MIPI-CSI | Description |
|---|---|---|
| 1,4,7,10,13,16,19,21,24,25,26,27,32,33 | GND | Power Ground & Signal Ground |
| 2 | MIPI_CSI0_RX_D3N | MIPI RX Lane3 iuput N |
| 3 | MIPI_CSI0_RX_D3P | MIPI RX Lane3 iuput P |
| 5 | MIPI_CSI0_RX_D2N | MIPI RX Lane2 iuput N |
| 6 | MIPI_CSI0_RX_D2P | MIPI RX Lane2 iuput P |
| 8 | MIPI_CSI0_RX_CLK1N | MIPI RX Clock iuput N |
| 9 | MIPI_CSI0_RX_CLK1P | MIPI RX Clock iuput P |
| 11 | MIPI_CSI0_RX_D1N | MIPI RX Lane1 iuput N |
| 12 | MIPI_CSI0_RX_D1P | MIPI RX Lane1 iuput P |
| 14 | MIPI_CSI0_RX_D0N | MIPI RX Lane0 iuput N |
| 15 | MIPI_CSI0_RX_D0P | MIPI RX Lane0 iuput P |
| 17 | MIPI_CSI0_RX_CLK0N | MIPI RX Clock iuput N |
| 18 | MIPI_CSI0_RX_CLK0P | MIPI RX Clock iuput P |
| 20 | MIPI_CAM3_CLKOUT | 1.8V, CLock ouput for Sensor |
| 22 | MIPI_CAM1_CLKOUT | 1.8V, CLock ouput for Sensor |
| 23 | MIPI_CSI0_PDN0_H(GPIO1_B0) | 1.8V, GPIO |
| 24 | I2C3_SCL_M0_MIPI | 1.8V, I2C Clock, pulled up to 1.8V with 2.2K on w3 |
| 25 | I2C3_SDA_M0_MIPI | 1.8V, I2C Clock, pulled up to 1.8V with 2.2K on w3 |
| 26 | MIPI_CSI0_PDN1_H(GPIO1_A7) | 1.8V, GPIO |
| 27 | CM_RST_L(GPIO4_A0) | 3.3V, GPIO |
| 28,29 | VCC_RX | 3.3V Power ouput |
| 30,31 | VCC_5V0 | 5V Power ouput |
MIPI DSI
| Pin | MIPI-DSI | Description |
|---|---|---|
| 1,4,7,10,13,16,27,33,34 | GND | Power and Signal Ground |
| 2 | MIPI_DPHY1_TX_D0N | MIPI1 TX Lane0 ouput N |
| 3 | MIPI_DPHY1_TX_D0P | MIPI1 TX Lane0 ouput P |
| 5 | MIPI_DPHY1_TX_D1N | MIPI1 TX Lane1 ouput N |
| 6 | MIPI_DPHY1_TX_D1P | MIPI1 TX Lane1 ouput P |
| 8 | MIPI_DPHY1_TX_CLKN | MIPI1 TX Clock ouput N |
| 9 | MIPI_DPHY1_TX_CLKP | MIPI1 TX Clock ouput P |
| 11 | MIPI_DPHY1_TX_D2N | MIPI1 TX Lane2 ouput N |
| 12 | MIPI_DPHY1_TX_D2P | MIPI1 TX Lane2 ouput P |
| 14 | MIPI_DPHY1_TX_D3N | MIPI1 TX Lane3 ouput N |
| 15 | MIPI_DPHY1_TX_D3P | MIPI1 TX Lane3 ouput P |
| 17 | LCD_PWM (PWM2_M2/GPIO4_C2) | 1.8V, GPIO/PWM |
| 18,19 | VCC3V3_LCD | 3.3V Power ouput |
| 20 | LCD_RESET (GPIO2_C1) | 1.8V, GPIO |
| 21 | /NC | No Connection |
| 22 | LCD_BL_EN (GPIO3_A1) | 3.3V, GPIO |
| 23 | I2C6_SCL_M0 | 1.8V, I2C Clock, pulled up to 1.8V with 2.2K on w3 |
| 24 | I2C6_SDA_M0 | 1.8V, I2C Data, pulled up to 1.8V with 2.2K on w3 |
| 25 | TP_INT (GPIO0_D3) | 1.8V, GPIO |
| 26 | TP_RST (GPIO0_C6) | 1.8V, GPIO |
| 28,29 | VCC5V0_LCD | 5V Power ouput |
| 31,32 | VCC_1V8 | 1.8V Power ouput |
Debug UART
| Pin | Assignment | Description |
|---|---|---|
| 1 | UART2_RX_M0 | intput |
| 2 | UART2_TX_M0 | output |
| 3 | GND | 0V |
PoE In
1.25mm connector
| Pin | Assignment | Description |
|---|---|---|
| 1 | VC1 | TX1 |
| 2 | VC2 | RX1 |
| 3 | VC3 | TX2 |
| 4 | VC4 | RX2 |
PoE Out
2.0mm connector
| Pin | Assignment | Description |
|---|---|---|
| 1 | VDD_POE | 12V Power ouput |
| 2 | VDD_POE | 12V Power ouput |
| 3 | GND | GND |
| 4 | GND | GND |
Resources
Source Code
ArmSom-bsp
Building a Linux System
W3 kernel
Improved Rockchip Linux
W3 uboot
ArmSoM/u-boot
W3 mainline linux
torvalds linux
RKNN-LLM
AI models to Rockchip chips
Official Images
Based on Debian bullseye works as official operating system by the ArmSom team.
The following systems have been tested and verified by ArmSoM officially:
Download link:
Google Drive link| logo | Description | Download |
|---|---|---|
 | debian11 for W3 : Debian 11, codenamed "Bullseye," is the latest stable release of the Debian project, released on August 14, 2021. Debian is an operating system based on free software known for its stability, security, and openness. | Google Drive link |
 | Android12 for W3 : Android is an open-source operating system based on the Linux kernel, primarily used for mobile devices, tablets, and smartwatches, among other smart devices. | Google Drive link |
Release Information
View the initial official release announcement for ArmSoM-W3 here: System Release Notice for ArmSoM-W3
Third Party Systems
| logo | Description | Download |
|---|---|---|
| Armbian for W3 : Armbian is a computing build framework that allows users to create ready-to-use images with working kernels in variable user space configurations for various single board computers. It provides various pre-build images for some supported boards. These are usually Debian or Ubuntu flavored. | armbian image | |
 | ubuntu-rockchip for W3 : This project aims to provide a default Ubuntu experience for Rockchip RK3588 devices. Get started today with an Ubuntu Server or Desktop image for a familiar environment. | ubuntu-rockchip |
Hardware Resources
User Manual
The user manual for the LM7 development kit (ArmSoM-W3) to help software engineers master the use of the development board.
Getting Started
Before starting to use the ArmSoM-W3, please prepare the following items:
Tool Preparation
- ArmSoM-W3 main board
- Power supply (choose one of three)
- USB Type-C PD 2.0 supporting 9V/2A, 12V/2A, 15V/2A and 20V/2A
- DC 12V adapter, 2.5mm
- PoE 12V
- System installation (choose one of two)
- MicroSD /TF card boot
- MicroSD card/TF card, Class 10 or above, at least 8GB SDHC, and card reader
- Here are some high speed TF cards tested and verified by the ArmSoM team:
- SanDisk 32GB TF (MicroSD) (developer recommended)
- SanDisk 32GB TF (MicroSD) Car Recorder & Security Monitoring Special Storage Card (recommended for long-term operation)
- Sandisk TF 8G Class10 microSD
- Sandisk TF 128G Class10 microSD XC TF 128G 48MB/S
- Onboard eMMC boot
- USB A to C data cable, to write images to the ArmSoM-W3 eMMC or use fastboot/adb commands over the type C port. You need a USB A to type C data cable connecting the ArmSoM-W3 and PC.
- MicroSD /TF card boot
Optional Accessories
- USB keyboard & mouse
- HDMI display and HDMI cable
- The ArmSoM-W3 is equipped with a full-size HDMI port, with maximum support for 8K@60 display.
- HDMI EDID is used to determine the best display resolution. This resolution will be selected on displays and TVs that support 1080p (or 4K/8K). If not for 1080p, EDID will find the next available resolution.
- Ethernet cable
- The ArmSoM-W3 supports ethernet internet access, up to 2.5G.
- The network cable is used to connect the ArmSoM-W3 to the local network and internet.
- Camera module
- The ArmSoM-W3 supports camera capabilities.
- It is recommended to use camera-module1 module, available through the ArmSoM Official Taobao store.
- LCD display
- The ArmSoM-W3 supports LCD display capabilities.
- It is recommended to use the ArmSoM Display 10 HD, available through the ArmSoM Official Taobao store.
- Audio cable
- Standard 3.5mm jack can be used to play audio via speakers or headphones.
- WiFi/Bluetooth card
- ArmSoM supports common wireless modules on the market, please check the Wireless section of the supported list.
- It is recommended to use RTL8852be, AP6256
- USB-A to USB-C data cable
Image Flashing Options
Interface Settings
For the first time using the ArmSoM-W3 development kit, please first get familiar with the Peripheral Interfaces to better understand the subsequent content.
2.5G Ethernet
If you are using wired ethernet internet, please insert the network cable into the RJ45 port on the ArmSoM-W3, and then the wired connection prompt will pop up on the system desktop.
How to manually configure ethernet?
- Switch to root user
sudo su
- Use the command -ifconfig to check if ethernet is working properly, then showing the eth0 or enP4p65s0 network card and ethernet IP address. Also use the ping tool to test connectivity to the network.
ifconfig
ping www.baidu.com
- If unable to ping, please try:
$ sudo dhclient eth0
or
$ sudo dhclient enP4p65s0
Audio
View the sound cards in the system.
armsom@armsom-w3:/# aplay -l
**** List of PLAYBACK Hardware Devices ****
card 0: rockchipdp0 [rockchip,dp0], device 0: rockchip,dp0 spdif-hifi-0 [rockchip,dp0 spdif-hifi-0]
Subdevices: 1/1
Subdevice #0: subdevice #0
card 1: rockchipes8316 [rockchip-es8316], device 0: fe470000.i2s-ES8316 HiFi es8316.7-0011-0 [fe470000.i2s-ES8316 HiFi es8316.7-0011-0]
Subdevices: 1/1
Subdevice #0: subdevice #0
card 3: rockchiphdmi0 [rockchip-hdmi0], device 0: rockchip-hdmi0 i2s-hifi-0 [rockchip-hdmi0 i2s-hifi-0]
Subdevices: 1/1
Subdevice #0: subdevice #0
card 4: rockchiphdmi1 [rockchip-hdmi1], device 0: rockchip-hdmi1 i2s-hifi-0 [rockchip-hdmi1 i2s-hifi-0]
Subdevices: 1/1
Subdevice #0: subdevice #0
USB Interface
The ArmSoM-W3 provides two USB 2.0 and two USB 3.0 ports.
Type-C
The ArmSoM-W3 features a full-featured USB Type‐C 3.0 port which supports up to 8K@30fps DP display.
HDMI
The ArmSoM-W3 has two HDMI output ports, both supporting CEC and HDMI 2.1, with maximum resolutions of 8Kp60 and 4Kp60 respectively.
Note: Please confirm the interface specifications of the HDMI cable before use.
HDMI IN
The ArmSoM-W3 uses the native rk3588 hdmi rx interface.The hdmi in interface can be tested using v4l2 commands.
View all video nodes
ls /dev/video*
Find rk hdmirx device
Execute command v4l2-ctl -d to specify video node. Execute command -D to view node info. Check for rk_hdmirx device using driver name.
armsom@armsom-w3:/# v4l2-ctl -d /dev/video0 -D
Driver Info:
Driver name : rk_hdmirx
Card type : rk_hdmirx
Bus info : fdee0000.hdmirx-controller
Driver version : 5.10.66
Capabilities : 0x84201000
Video Capture Multiplanar
Streaming
Extended Pix Format
Device Capabilities
Device Caps : 0x04201000
Video Capture Multiplanar
Streaming
Extended Pix Format
Query resolution and image formats
Query current resolution and image formats:
armsom@armsom-w3:/# v4l2-ctl -d /dev/video17 --get-fmt-video
Format Video Capture Multiplanar:
Width/Height : 3840/2160
Pixel Format : 'NV16'
Field : None
Number of planes : 1
Flags : premultiplied-alpha, 000000fe
Colorspace : Unknown (1025fcdc)
Transfer Function : Unknown (00000020)
YCbCr Encoding : Unknown (000000ff)
Quantization : Default
Plane 0 :
Bytes per Line : 3840
Size Image : 16588800
Capture image files
Save image files to device and view with 7yuv etc:
v4l2-ctl --verbose -d /dev/video17 \
--set-fmt-video=width=3840,height=2160,pixelformat='NV16' \
--stream-mmap=4 --stream-skip=3 \
--stream-to=/data/4k60_nv16.yuv \
--stream-count=5 --stream-poll
RGB LED
The ArmSoM-W3 has a power LED and user LED.
Power Indicator LED
The power LED is green. On the ArmSoM-W3 it is solid on by default when powered.User Indicator LED
The user LED is blue. By default its blinking state shows a running kernel.
The user can control via commands:
armsom@armsom-w3:/# sudo su
root@armsom-w3:/# echo timer > /sys/class/leds/blue:status/trigger
root@armsom-w3:/# echo activity > /sys/clas
RTC
- The ArmSoM-W3 is equipped with an RTC IC hym8563.
- First, insert the RTC battery to power the RTC IC.
- Note that we should keep the RTC battery in the RTC connector and confirm the rtc hym8563 device has been created
armsom@armsom-w3:/# dmesg | grep rtc
[ 6.407133] rtc-hym8563 6-0051: rtc information is valid
[ 6.412731] rtc-hym8563 6-0051: registered as rtc0
[ 6.413779] rtc-hym8563 6-0051: setting system clock to 2022-06-22T01:22:26 UTC (1655860946)
- Locating rtc0, then use the following commands to set system time and sync to rtc0.
armsom@armsom-w3:/# hwclock -r
2023-11-03 10:32:40.461910+00:00
armsom@armsom-w3:/# date
11/03/2023 Friday 10:33:12 UTC
armsom@armsom-w3:/# hwclock -w
armsom@armsom-w3:/# hwclock -r
armsom@armsom-w3:/# poweroff
- Removing RTC battery, after 10mins or longer insert battery and boot ArmSoM-W3, check if RTC is in sync with system clock
armsom@armsom-w3:/# hwclock -r
2023-11-03 10:35:40.461910+00:00
armsom@armsom-w3:/# date
11/03/2023 Friday 10:36:01 UTC
FAN
The ArmSoM-W3 is equipped with a 5V fan, using a 1.25mm connector
armsom@armsom-w3:/# echo 0 > /sys/devices/platform/fd8b0010.pwm/pwm/pwmchip*/export
armsom@armsom-w3:/# echo 10000 > /sys/devices/platform/fd8b0010.pwm/pwm/pwmchip*/pwm0/period
armsom@armsom-w3:/# echo 5000 > /sys/devices/platform/fd8b0010.pwm/pwm/pwmchip*/pwm0/duty_cycle
armsom@armsom-w3:/# echo inversed > /sys/devices/platform/fd8b0010.pwm/pwm/pwmchip*/pwm0/polarity
armsom@armsom-w3:/# echo 1 > /sys/devices/platform/fd8b0010.pwm/pwm/pwmchip*/pwm0/enable
armsom@armsom-w3:/# echo 0 > /sys/devices/platform/fd8b0010.pwm/pwm/pwmchip*/pwm0/enable
M.2 Interface
The ArmSoM-W3 provides two M.2 connectors:
- There is an M.2 E Key connector on the front of the board with a 2230 mounting hole, providing PCIe 2.1 single-channel, USB, SATA, SDIO, PCM and UART signals, supporting standard industrial M.2 WiFi 6 modules.
ArmSoM recommends using RTL8852BE, AP6256. Installed in the ArmSoM-W3 M.2 E slot and then it can get online after wifi setup.
# Load driver
armsom@armsom-w3:/# insmod system/lib/modules/rtkm.ko
armsom@armsom-w3:/# insmod system/lib/modules/rtkm.ko
armsom@armsom-w3:/# insmod /usr/lib/modules/rtk_btusb.ko
armsom@armsom-w3:/# lsmod
Module Size Used by
8852be 4030464 0
rtkm 16384 1 8852be
rtk_btusb 57344 0
- There is an M.2 M Key connector on the back of the ArmSom-W3 with a quad-channel PCIe 3.0 interface. There is a standard M.2 2280 mounting hole on board that can deploy M.2 2280 NVMe SSDs. Note: This M.2 interface does not support M.2 SATA SSDs.
armsom@armsom-w3:/# mkdir temp
armsom@armsom-w3:/# mount /dev/nvme0n1 temp
WIFI
# 1. Switch to super user mode
armsom@armsom-w3:/# sudo su
# 2. Open the WIFI
root@armsom-w3:/# nmcli r wifi on
# 3. Scan WIFI
root@armsom-w3:/# nmcli dev wifi
# 4. Connect to WIFI network
root@armsom-w3:/# nmcli dev wifi connect "wifi_name" password "wifi_password"
BT
# 1. Activate bluetooth
armsom@armsom-w3:/# service bluetooth start
# 2. Enter to bluetoothctl
armsom@armsom-w3:/# bluetoothctl
# 3. Input the below commands to connect
armsom@armsom-w3:/# power on
armsom@armsom-w3:/# agent on
armsom@armsom-w3:/# default-agent
armsom@armsom-w3:/# scan on
armsom@armsom-w3:/# pair yourDeviceMAC
MIC Recording
armsom@armsom-w3:~# arecord -D hw:1,0 -f S16_LE -t wav -c2 -r 16000 -d 3 t.wav
Recording WAVE 't.wav' : Signed 16 bit Little Endian, Rate 16000 Hz, Stereo
armsom@armsom-w3:~# aplay t.wav
Playing WAVE 't.wav' : Signed 16 bit Little Endian, Rate 16000 Hz, Stereo
Camera
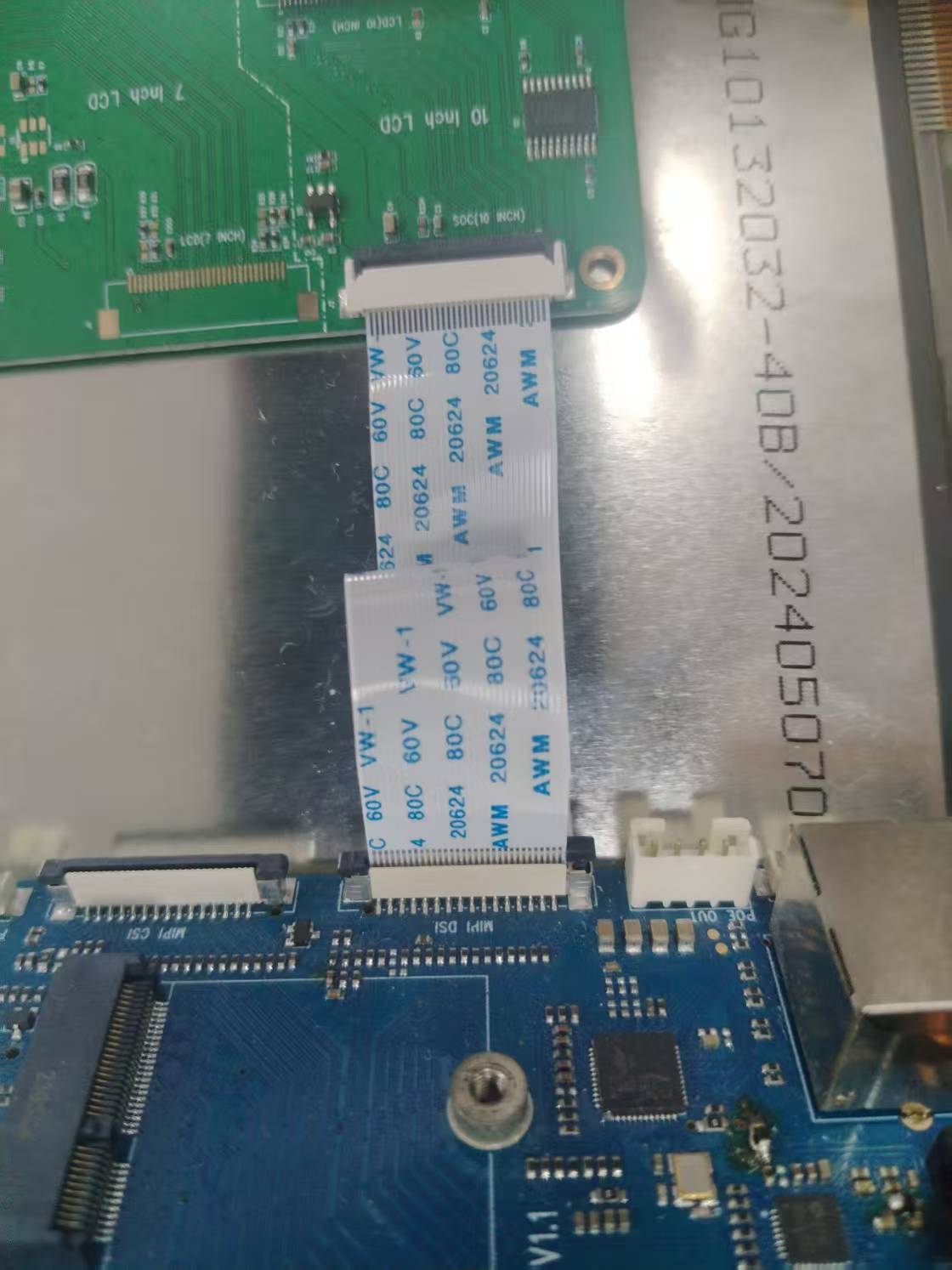
MIPI-CSI
The camera uses the camera-module1 module. After connecting and powering on the camera module you can view the boot logs.
root@armsom-w3:/# dmesg | grep ov13850
[ 3.555686] ov13850 3-0010: driver version: 00.01.05
[ 3.555722] ov13850 3-0010: Failed to get power-gpios, maybe no use
[ 3.555762] ov13850 3-0010: Looking up avdd-supply from device tree
[ 3.555773] ov13850 3-0010: Looking up avdd-supply property in node /i2c@feab0000/ov13850@10 failed
[ 3.555794] ov13850 3-0010: supply avdd not found, using dummy regulator
[ 3.555874] ov13850 3-0010: Looking up dovdd-supply from device tree
[ 3.555883] ov13850 3-0010: Looking up dovdd-supply property in node /i2c@feab0000/ov13850@10 failed
[ 3.555895] ov13850 3-0010: supply dovdd not found, using dummy regulator
[ 3.555927] ov13850 3-0010: Looking up dvdd-supply from device tree
[ 3.555935] ov13850 3-0010: Looking up dvdd-supply property in node /i2c@feab0000/ov13850@10 failed
[ 3.555945] ov13850 3-0010: supply dvdd not found, using dummy regulator
[ 3.555972] ov13850 3-0010: could not get default pinstate
[ 3.555979] ov13850 3-0010: could not get sleep pinstate
[ 3.561005] ov13850 3-0010: Detected OV00d850 sensor, REVISION 0xb2
[ 3.561027] rockchip-csi2-dphy csi2-dphy0: dphy0 matches m00_b_ov13850 3-0010:bus type 5
Use v4l2-ctl for image capture
armsom@armsom-w3:/# v4l2-ctl -d /dev/video11 --set-selection=target=crop,top=0,left=0,width=2112,height=1568 --set-fmt-video=width=2112,height=1568,pixelformat=NV12 --stream-mmap=3 --stream-to=/nv12.bin --stream-count=1 --stream-poll
Use gst-launch-1.0 for direct video recording
armsom@armsom-w3:/# gst-launch-1.0 v4l2src device=/dev/video11 ! video/x-raw,format=NV12,width=2112,height=1568, framerate=30/1 ! xvimagesink
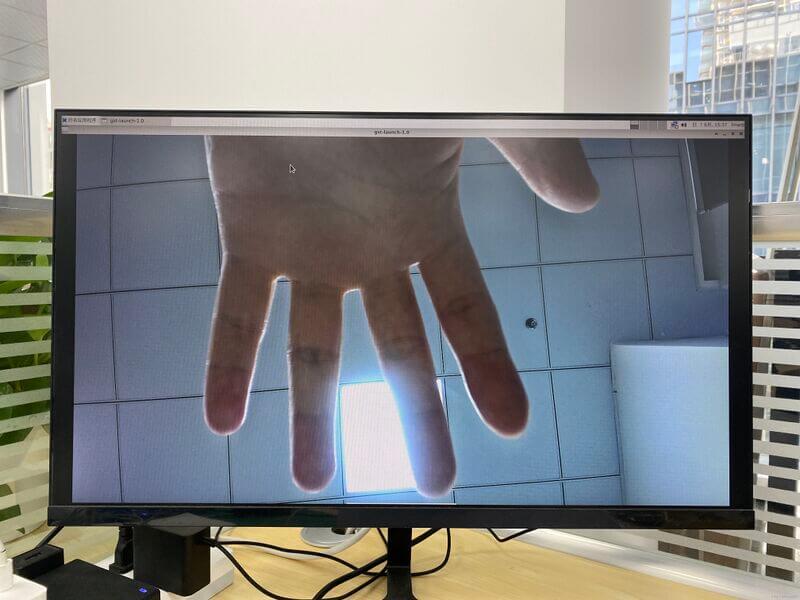
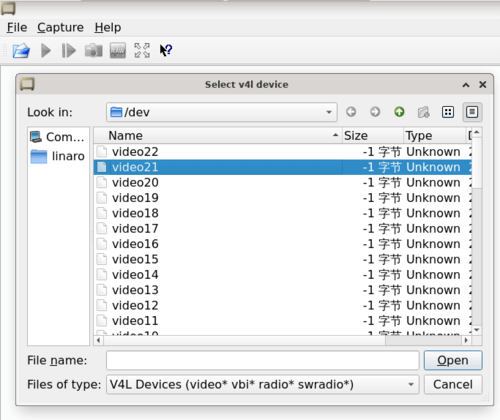
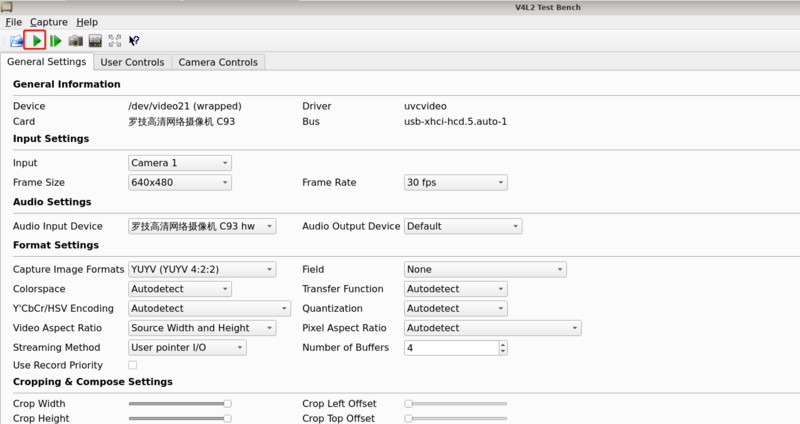
USB3.0 Camera
After connecting the usb3.0 camera, open the Qt V4L2 test Utility app for testing

Open video node: video21
Click the camera button and you will see the camera screen
MIPI DSI
The ArmSoM-W3 has a maximum resolution up to 4K@60Hz
Purchase Samples
ArmSoM online shop: https://www.armsom.org/product-page/sige7
ArmSoM Aliexpress online shop: https://www.aliexpress.com/item/3256805434864544.html
ArmSoM Taobao shop: https://item.taobao.com/item.htm?id=714794342755
OEM&ODM, please contact: sales@armsom.org
What do others say about the W3 ?
- sbc compare: W3 Benchmark Comparison on sbc.compare
Notes
- Before handling the device, please ensure you wear an anti-static wrist strap or take electrostatic discharge measures to prevent damage to the development board.
- Assembly should be performed in an electrostatic-safe environment, avoiding operations in dry and low-humidity conditions.
- When not in use, store the device in an anti-static bag and keep it in a suitably temperature-controlled, low-humidity environment to prevent static electricity buildup.
- When handling the device, avoid friction or collisions to prevent the generation of static electricity that could cause damage.
- When holding the device, try to avoid direct contact with the chips on the mainboard to prevent static damage.
- Do not plug or unplug wires or other devices while the device is operating to avoid damage from electrical surges.
- When connecting or disconnecting the GPIO/MIPI expansion interfaces, make sure to turn off the power and disconnect the power cable to prevent damage from electrical current.
Without effective cooling measures, the surface temperature of the main chip may exceed 60 degrees. When handling the device, please avoid direct contact with the SoC and surrounding power inductors to prevent burns. Ensure that the environment is well-ventilated during operation to prevent localized heat buildup, which could lead to overheating. Additionally, do not place the device in direct sunlight. It is recommended to choose between the official cooling fan, heat sink, or third-party cooling kits based on specific usage conditions to ensure optimal cooling performance.