4. CAN 使用
4.1 CAN 简介
CAN 协议是在 1980 年代由 Bosch 公司开发的,旨在满足汽车工业的需求,但随着时间的推移,它逐渐应用于其他领域。CAN 是一种基于消息的通信协议,允许多台设备通过总线进行通信。每个设备(节点)可以向总线上发送消息,所有设备都可以接收这些消息。
主要特点:
- 多主机:CAN是一个多主机总线系统,所有节点都可以发起通信。
- 实时性:CAN协议具有实时性,适合于时效性要求高的应用。
- 容错性:CAN协议具有强大的错误检测与容错能力,可以在恶劣的环境下可靠工作。
- 优先级:消息优先级由消息ID确定,ID越小,优先级越高。
4.2 CAN 使用实例
4.2.1 CAN 引脚
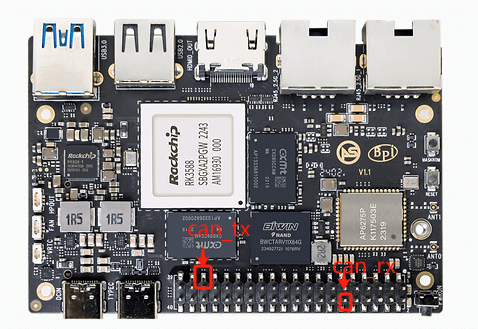
以ArmSoM-Sige7为实例,CAN在40PIN中的位置:
| I2C | 引脚 | 功能 |
|---|---|---|
| CAN1_TX_M1 | 3 | can1_m1 数据传输引脚 |
| CAN1_RX_M1 | 5 | can1_m1 数据接收引脚 |
| CAN1_RX_M0 | 12 | can1_m0 数据传输引脚 |
| CAN1_TX_M0 | 35 | can1_m0 数据接收引脚 |
4.2.2 硬件连接
CAN模块之间接线:CAN_TX接CAN_TX,CAN_RX接CAN_RX。
4.2.3 内核配置
- rockchip_linux_defconfig配置:
CONFIG_CAN=y
CONFIG_CAN_DEV=y
CONFIG_CAN_ROCKCHIP=y
CONFIG_CANFD_ROCKCHIP=y
- 内核配置:
cd kernel
make ARCH=arm64 menuconfig
make savedefconfig
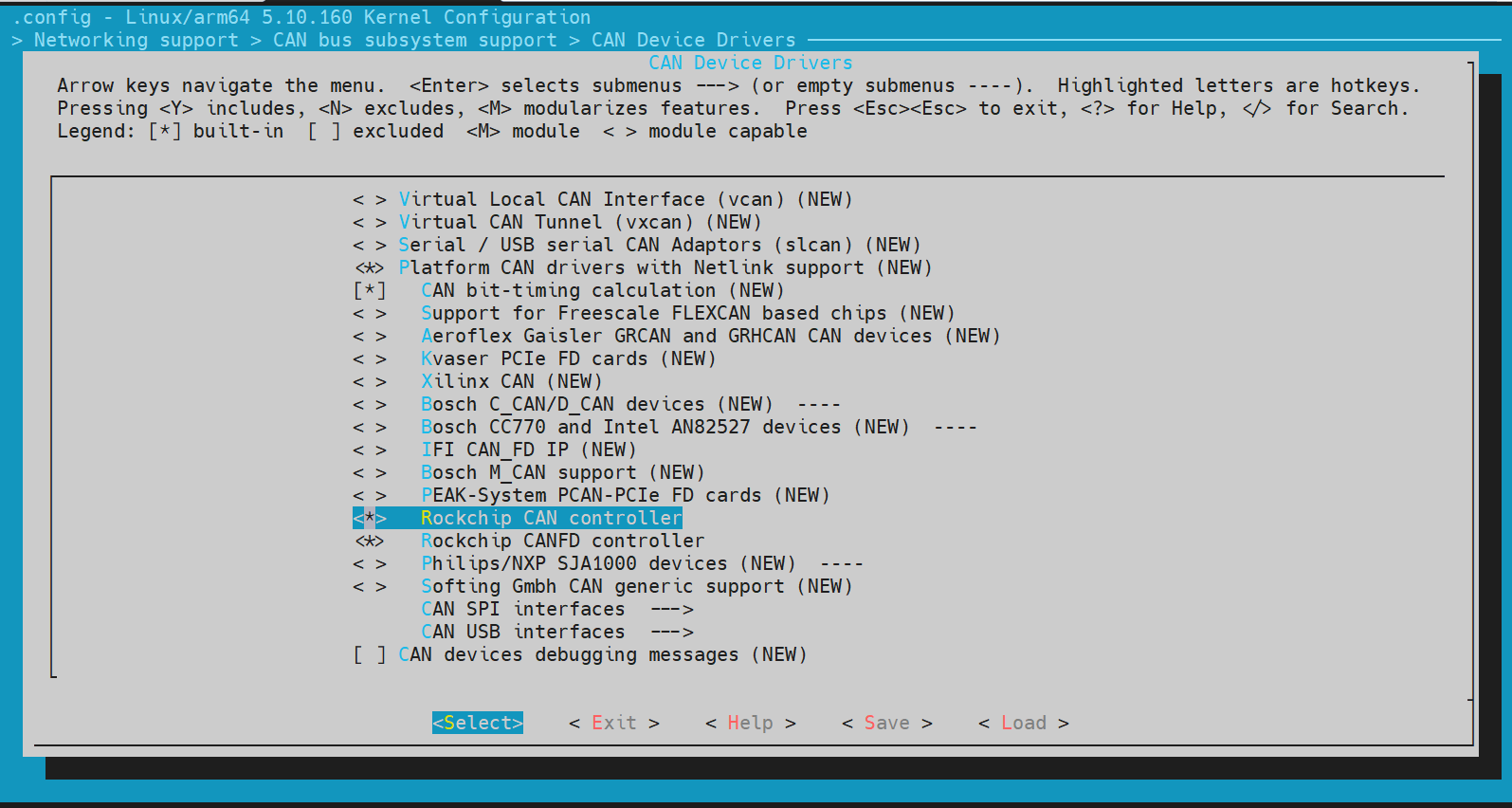
- 选择:Networking support ---> CAN bus subsystem support ()--->CAN Device Drivers() ---> Platform CAN drivers with Netlink support(*)
4.2.4 DTS 节点配置
主要参数:
interrupts 转换完成,产生中断信号。
clock 时钟属性,用于驱动开关clk,reset属性,用于每次复位总线。
pinctrl 配置CAN相关的引脚信息,功能复用
/* can1 */
&can1 {
compatible = "rockchip,can-2.0";
reg = <0x0 0xfea60000 0x0 0x1000>;
interrupts = <GIC_SPI 342 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&cru CLK_CAN1>, <&cru PCLK_CAN1>;
clock-names = "baudclk", "apb_pclk";
resets = <&cru SRST_CAN1>, <&cru SRST_P_CAN1>;
reset-names = "can", "can-apb";
tx-fifo-depth = <1>;
rx-fifo-depth = <6>;
status = "okay";
assigned-clocks = <&cru CLK_CAN1>;
assigned-clock-rates = <200000000>;
pinctrl-names = "default";
pinctrl-0 = <&can1m0_pins>; #根据原理图进行配置
};
compatible = “rockchip,can-1.0” ,rockchip,can-1.0用来匹配can控制器驱动。
compatible = “rockchip,can-2.0” ,rockchip,can-2.0用来匹配canfd控制器驱动。
assigned-clock-rates用来配置can的始终频率,如果CAN的比特率低于等于3M建议修改CAN时钟到100M,信号更稳定。高于3M比特率的,时钟设置200M就可以。
pinctrl配置:根据实际板卡连接情况配置can_h和can_l的iomux作为can功能使用。
4.2.5 使能 CAN 通信接口
CAN接口在默认情况是关闭状态的,需要使能才能使用
在 ubuntu/debain 操作系统中,/boot/uEnv/uEnv.txt 文件用于配置系统启动时的参数和设备树插件。你可以通过编辑该文件来启用或禁用 CAN 设备树插件,确保 CAN 总线可以在启动时正确加载。
如果你希望检查或启用 CAN 相关设备树插件,可以按照以下步骤操作:
查看设备树插件配置
打开文件: 通过终端打开 /boot/uEnv/uEnv.txt 文件,使用文本编辑器如 nano 或 vim。 这里以激活 can-m1 为例,将 rk3588-can1-m1 打开如下:
dtoverlay=/dtb/overlay/rk3588-armsom-can1-m1.dtbo
#dtoverlay=/dtb/overlay/rk3588-armsom-i2c0-m1.dtbo
将dtoverlay前的#去掉,编辑完成后,保存文件并退出编辑器 重启系统使配置生效:
armsom@armsom:/boot$ sudo vi /boot/uEnv/uEnvarmsom-sige7.txt
cmdline="earlyprintk console=ttyFIQ0 console=tty1 consoleblank=0 loglevel=7 roott
wait rw rootfstype=ext4"
enable_uboot_overlays=1
#overlay_start
#40pin
#dtoverlay=/dtb/overlay/rk3588-armsom-can1-m0.dtbo
dtoverlay=/dtb/overlay/rk3588-armsom-can1-m1.dtbo
#dtoverlay=/dtb/overlay/rk3588-armsom-i2c0-m1.dtbo
#dtoverlay=/dtb/overlay/rk3588-armsom-i2c1-m0.dtbo
#dtoverlay=/dtb/overlay/rk3588-armsom-i2c3-m1.dtbo
#dtoverlay=/dtb/overlay/rk3588-armsom-i2c7-m3.dtbo
#dtoverlay=/dtb/overlay/rk3588-armsom-i2c8-m4.dtbo
#dtoverlay=/dtb/overlay/rk3588-armsom-pwm2-m1.dtbo
#dtoverlay=/dtb/overlay/rk3588-armsom-pwm3-m1.dtbo
#dtoverlay=/dtb/overlay/rk3588-armsom-pwm5-m2.dtbo
#dtoverlay=/dtb/overlay/rk3588-armsom-pwm6-m2.dtbo
#dtoverlay=/dtb/overlay/rk3588-armsom-pwm7-m3.dtbo
#dtoverlay=/dtb/overlay/rk3588-armsom-pwm8-m0.dtbo
#dtoverlay=/dtb/overlay/rk3588-armsom-pwm12-m0.dtbo
#dtoverlay=/dtb/overlay/rk3588-armsom-pwm13-m0.dtbo
#dtoverlay=/dtb/overlay/rk3588-armsom-pwm13-m2.dtbo
执行完上面修改后重启系统
armsom@armsom:/boot$ sync
armsom@armsom:/boot$ sudo reboot
- Q: 如果直接拔掉电源进行重启,是否可能导致文件未修改或 overlay 系统启动失败?
- A: 当直接拔掉电源或强制关机时,可能会出现文件未能及时从内存(RAM)同步到存储设备(如硬盘、SSD)的情况。这是因为操作系统通常会将数据暂存于内存中,并定期将这些数据写入磁盘。为避免此问题,建议在关机前执行 “sync” 命令,确保所有数据已写入磁盘,再拔掉电源或关机。
4.3 CAN 通信测试
- 查询当前⽹络设备:
ifconfig -a
- CAN启动
ip link set can0 down //关闭CAN
ip link set can0 type can bitrate 500000 #设置⽐特率500KHz
ip -details -statistics link show can0 #打印can0信息
ip link set can0 up //启动CAN
- CAN发送
cansend can0 123#DEADBEEF #发送(标准帧,数据帧,ID:123,date:DEADBEEF)
cansend can0 123#R #发送(标准帧,远程帧,ID:123)
cansend can0 00000123#12345678 #发送(扩展帧,数据帧,ID:00000123,date:DEADBEEF)
cansend can0 00000123#R #发送(扩展帧,远程帧,ID:00000123)
- CAN接收
candump can0 //candump can0